
Abstract
Maintaining reliable navigation is critical in the ever-evolving world of autonomous vehicles and drones, even when GNSS is disabled due to interference or obstacles. This article highlights three advanced solutions to keep autonomous systems up and running:
- Inertial Navigation Systems (INS): Advanced INS technology bridges gaps during GNSS outages using precision sensors to track motion and orientation. Combined with intelligent algorithms, these systems provide reliable operation, minimizing drift and maximizing accuracy.
- Visual Inertial Odometry (VIO): Utilizing the capabilities of high-definition cameras and computer vision, VO allows autonomous systems to interpret visual cues from the environment, providing accurate navigation even when GNSS signals are lost. A more advanced machine vision-based variant, the Visual Positioning System (VPS), uses a camera to map images and prepare terrain maps.
- Sensor Fusion: By complementing INS with additional sensors such as encoder, odometer, lidar, Doppler speed sensor, etc., high accuracy can be achieved without a GNSS signal.
Learn how these technologies can protect your autonomous solutions in the future by providing seamless navigation in all conditions.
Here are the sections that will be covered: Introduction to autonomous navigation or reasons why GNSS may not work, Key approaches to solving this problem, and How Inertial Labs Technologies for GNSS-denied Environments. Finally, the benefits of using Inertial Labs’ solutions will be summarized.
Section 1. Introduction to autonomous navigation or reasons why GNSS may not work
Loss of GNSS (Global Navigation Satellite System) signal is a significant challenge for navigation systems, particularly in scenarios where positioning accuracy is critical for safety and operational efficiency. The navigation system may lose access to satellite signals in urban canyons, underground areas, or regions with solid radio frequency interference (jamming/spoofing). This increases errors, as IMU drifts cannot be corrected using GNSS.
Most modern MEMS-based navigation systems use a Kalman filter to reduce errors, incorporating IMU data and GNSS signals [1]. When the inertial navigation system (INS) operates under favorable conditions, such as open skies with GNSS signals available, positioning accuracy can reach about 1–2 cm. However, if GNSS signals are lost, the INS switches to autonomous mode. Gyroscope drift increases errors over time, so INS specifications sometimes indicate that the error is correlated as a percentage of the distance traveled (%DT) [2].
Looking at Figure 1, significant outliers can be observed on the left, corresponding to areas where GNSS signals were unavailable, such as under bridges, near tall buildings, or under trees. Autonomous navigation aims to produce a trajectory without these outliers, as shown on the right.

Figure 1. Trajectory of motion.
This is accomplished by using additional means to improve position accuracy without GNSS, which we will discuss in the next section.
Section 2. Key approaches to solving this problem
The first approach to improve reliability is implementing a Tightly Coupled (TC) IMU+GNSS scheme, Figure 2. The TC strategy, known as “centralized,” processes the INS navigation parameters and the raw GNSS data through a single central Kalman filter, Figure 5. Unlike the Loosely Coupled approach, where the raw GNSS measurements are analyzed in a separate filter, they are directly integrated into a single filter in TC. The difference between the pseudoranges and Doppler shifts and the predicted INS measurements are used as input to the Kalman filter.
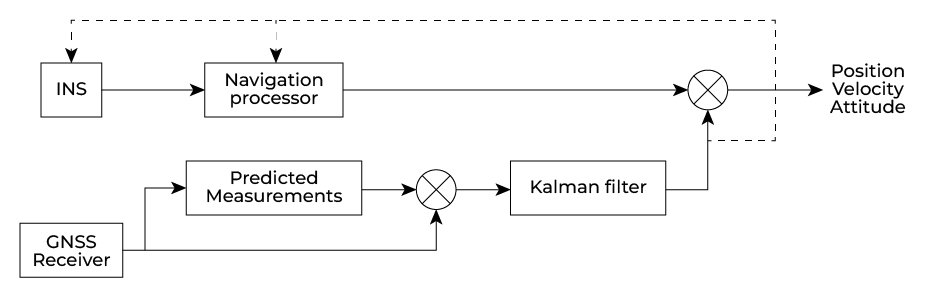
Figure 2. Tightly Coupled INS and GNSS integration.
The predicted INS measurements (range and range rate) are calculated based on the GNSS satellite position and velocity obtained from the ephemeris and the user position and velocity determined by the INS. The concepts of closed and open loops also apply to the TC strategy.
When using the same system components, tightly coupled INS/GPS integration almost always provides better accuracy and reliability than Loosely Coupled INS, Figure 3.

Figure 3. Accuracy at Tightly and Loosely coupled.
To learn more about comparing Loosely and Tightly coupled integrations, see [3].
But what do you do if there is no GNSS signal at all? Before answering this question, let’s look at some definitions related to autonomous mode.
The first term is Dead-reckoning, a navigation mode in which the current location of an object is calculated based on the known last location, distance traveled, and direction of travel. This method does not use external signal sources such as satellite navigation (GNSS) but relies solely on speed, time, steering angles, and acceleration data. This mode is activated when the GNSS signal is lost and, as mentioned earlier, the error due to drifts increases. Therefore, other non-GNSS approaches are used.
The first approach is APNT (Alternative Position, Navigation, Timing), the essence of which is to use additional sensors to compensate for drifts and improve accuracy in an autonomous mode of INS operation, such as radio modules, odometers, encoders, lidars, ultrasonic radars, wind speed sensors, cameras, etc. The APNT approach is directly related to the concept of Sensor Fusion. Sensor Fusion combines data from different sensors to obtain more accurate, reliable, and comprehensive information about the position and motion of an object [4]. It is an essential technology in autonomous systems that helps compensate for each sensor’s limitations and improve the overall accuracy of navigation and orientation.
Thus, Sensor Fusion is an integral part of the APNT approach. As understood above, the following fundamental approach utilizes additional data, Figure 4.
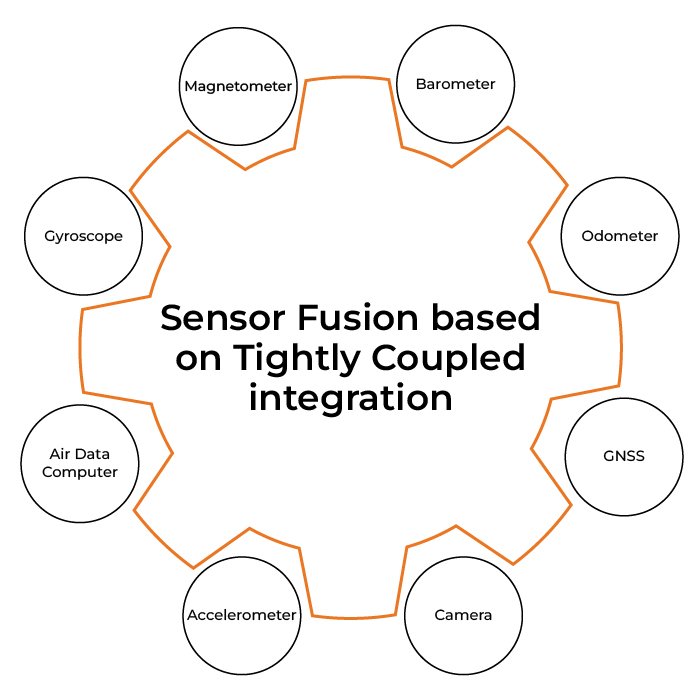
Figure 4. Sensor Fusion.
However, this approach can be used for GNSS-denied environments and with satellite signals. The work [5] investigated navigation accuracy using Sensor Fusion. According to the results, the use of additional sensors gave a fourfold increase in accuracy for the northern component and a twofold increase for the eastern component—the paper [6] proposed using Sensor Fusion for mobile robot navigation. Through odometry and sonar, it was possible to reduce the systematic error, thereby improving the navigation accuracy, Figure 5.
 |  |
| “Simulation experiment result using EKF with only odometry measurement.” | “Simulation experiment result using EKF with odometry and sonar measurement, adapted by AFLS.” |
Figure 5. Reduced uncertainty thanks to Sensor Fusion. | |
Another innovative approach is the use of map-based orientation using a camera. Systems using this navigation method are called Visual Positioning System (VPS), Figure 6. In simple words, such a system can also use GNSS and TC to navigate when the satellite signal is available. But if lost, the system goes offline and uses preloaded terrain maps compared to the images (or video stream) received from the camera. The key element of such a system is the Map-Matcher. It processes the camera data and compares it with the maps. As a result, the user gets navigation data in places with no satellite signal. However, these systems also have disadvantages, which lie in their dependence on external environmental conditions, such as light, variety of terrain, and the need to update maps constantly.

Figure 6: A simplified schematic of a VPS.
In summary, VPS provides significant advantages, especially when traditional positioning methods like GPS do not work correctly. However, the technology also has limitations related to lighting conditions, environmental variability, and the need for regular map updates. These factors should be considered when choosing a VPS for specific applications.
Thus, there are many solutions for navigation in GNSS-denied environments. Each has pros and cons, so combining as many sensors and technologies as possible to maximize accuracy can be the best result.
Let’s look at Inertial Labs’ solutions designed for GNSS-denied situations.
Section 3. Inertial Labs Technologies for GNSS-denied Environments
For years, Inertial Labs has produced high-accuracy Inertial Navigation Systems (INS) at the world’s best price-performance ratio. An INS estimates the position, attitude, and velocity using the gyroscopes and accelerometers inside an inertial measurement unit (IMU). Position accuracy can be significantly improved when the INS is aided by the Global Navigation Satellite System (GNSS). However, GNSS is not always available. Customer requirements demand for better performance of an INS during GNSS outage.

As a proven effective alternative, Inertial Labs developed the Tunnel Guide feature for the GPS-Aided INS: an advanced algorithm that implements continuous dynamic modeling for land vehicle motion. As a result, the INS can mitigate errors and increase the accuracy of its MEMS IMU during prolonged GNSS outages. Now, the position error of a land vehicle remains low even in a GNSS outage area such as a tunnel, a city with signal-blocking buildings, or any location where satellite communication is being blocked, spoofed, or jammed [7]. The Tunnel Guide feature has proven to be an effective solution for military vehicles such as Infantry Carrier Vehicles (ICV), Mobile Gun Systems (MGS), Anti-Tank Guided Missile Vehicles (ATGM), Anti-Drone Guided Missile Vehicles (ADGMV), NBC Reconnaissance Vehicles (NBCRV), Assault Amphibious Vehicles (AAV), and Light Armored Multipurpose Vehicles (LAMV).
The average drift rate of the second sample set was calculated to be 0.2% DT over the 30-minute outage with a peak drift of approximately 45 meters. These results show that Tunnel Guide significantly improves performance accuracy during GNSS outages at a much lower cost.
However, even though this was not the limit, an additional data source directly from the vehicle’s OBD-II port via CANbus was used for even greater accuracy. The vehicle was driven at an average speed of about 20 mph, and after 15 minutes of driving, a GNSS failure was simulated. After another 30 minutes of driving under GNSS failure conditions, the device was again provided with GNSS corrections, and the solution converged. After processing the data, an error plot was obtained, shown in Figure 8.

Figure 8. The error occurred when using data from the vehicle’s OBD-II port.
It can be concluded that the use of auxiliary CANbus data in the INS-D Kalman filter resulted in a horizontal position error of 0.056% DT, which is a significant improvement over the 0.2% when CANbus data was not used.
The Inertial Labs INS is designed to integrate RF (Radio Frequency) ranging data from advanced, infrastructure-less MESH network-based tactical Software Defined Radios (SDR) developed by DTC (Domo Tactical Communications). In applications, DTC’s BluSDR-30-B radios act as base (“beacon”) points, covering a range of up to 30 kilometers from the vehicle’s BluSDR-30 radio, which is mounted on aerial or land systems along with the INS. Once activated, these radios form a secure MESH network that automatically transmits Time of Flight (ToF) packets across the network, accommodating up to 144 nodes. The SDR on board the vehicle receives real-time ToF data from distant base radios, which also share their precise 3D position coordinates [8].

Figure 9. RF-Geolocation.
Each Time of Flight (ToF) and base radio location packet is transmitted to the rover radio within the MESH network. This data is processed by the INS’s data-logging unit and integrated into a tightly coupled Kalman filter, allowing the system to triangulate the vehicle’s position using RF ranges from two or more deployed ground radios. This unique integration of the INS with DTC’s SDRs provides a significant advantage over industry solutions lacking the capability to seamlessly fuse aiding data from various alternative PNT (Position, Navigation, and Timing) sources. It is important to note that the ground-based SDRs must maintain line-of-sight with the vehicle’s SDR to remain active within the MESH network. The radios can operate in multiple UHF RF spectrum bands, output signals at 1W (+30dBm), and have adjustable bandwidths ranging from 1.25 MHz to 20 MHz. Depending on deployment conditions, such as multipath interference, the output power, and bandwidth can be configured to optimize RF ranging performance.
With the increasing prevalence of GNSS jamming and spoofing, the demand for alternative position, navigation, and timing (APNT) solutions in GNSS-denied environments has significantly grown. One common source of aiding data for UAV navigation in such situations is an air data computer (ADC) equipped with differential and static pressure sensors. True airspeed and barometric pressure measurements during flight enable the Inertial Labs INS navigation filter to adjust the vehicle’s velocity and Mean Sea Level (MSL) altitude estimates, effectively reducing positional drift in GNSS-denied conditions. ADCs are specifically suitable for fixed-wing UAVs, as multi-rotor platforms can move simultaneously in longitudinal and lateral directions. Inertial Labs has demonstrated the effectiveness of GNSS-denied navigation using a dual-axis airspeed sensor compared to free inertial/dead reckoning solutions through simulated and real-world testing. The dual-axis airspeed sensor from FT Technologies utilizes an advanced digital anemometer with acoustic resonance technology to measure airspeed from any direction. By providing airspeed magnitude and direction, the sensor allows the INS to accurately estimate horizontal airspeed along both the longitudinal and lateral axes. Across all tests, aiding data from the dual-axis airspeed sensor significantly reduced GNSS-denied positional drift compared to dead reckoning alternatives.

Figure 10. AIR Data Computer.
Integration of sensors such as wheel encoders is also supported, as shown in Figure 11, and ground speed radar, Figure 12. A wheel encoder measures the rotational revolutions of a ground vehicle’s wheels. This data can be used to estimate the distance traveled, which is especially useful in environments where GNSS signals are unavailable. The accumulated distance, measured in millimeters, is sent to the INS as aiding data. This odometer-aiding data helps the INS minimize position estimation errors in GNSS-denied areas. When GNSS data becomes available, the odometer data adjusts the scale factor coefficients and corrects any misalignment angles between the vehicle’s axes and the INS.
 |  |
Figure 11. Wheel Encoder. | Figure 12. Ground Speed Radar. |
Ground speed radar for land-based dynamic vehicles uses Radar Doppler technology. It features a radar frontend with planar antennas that continuously emit electromagnetic waves at a frequency of 24 GHz. As the vehicle moves, the frequency of the waves reflected shifts due to the Doppler effect. This Doppler signal provides accurate ground speed measurements. The data is then sent to the INS filter to improve position estimates in GNSS-denied environments. Unlike wheel encoders, which cannot account for wheel slippage, ground speed radar can detect and compensate for slippage, making it especially useful when the vehicle’s wheels are rolling but slipping.
Our solutions also include support for machine vision-assisted navigation technology. Machine vision is now a key component of sensor fusion platforms designed to provide highly accurate and reliable PNT data for users needing strong resilience against GPS/GNSS disruptions. It serves as a vital alternative PNT source, functioning even when onboard vehicle communication systems are unavailable. Inertial Labs integrates a robust sensor module consisting of a camera and an AHRS/IMU with an INS processing unit. This integration enables real-time ground speed calculations by analyzing a continuous stream of terrain imagery captured by day or infrared cameras on an aerial platform, Figure 13.
Figure 13. Visual Navigation Module.
Ground speed calculations are integrated with other complementary sensor systems to provide highly accurate PNT data during GNSS outages. Inertial Labs employs advanced techniques to calibrate the camera and IMU subsystems, ensuring their intrinsic and extrinsic properties are determined precisely.
And thanks to the integration of innovative technologies from Maxar, map navigation is available to the user.
Therefore, the technologies from Inertial Labs fully realize the Sensor Fusion Platform, Figure 14 [9].
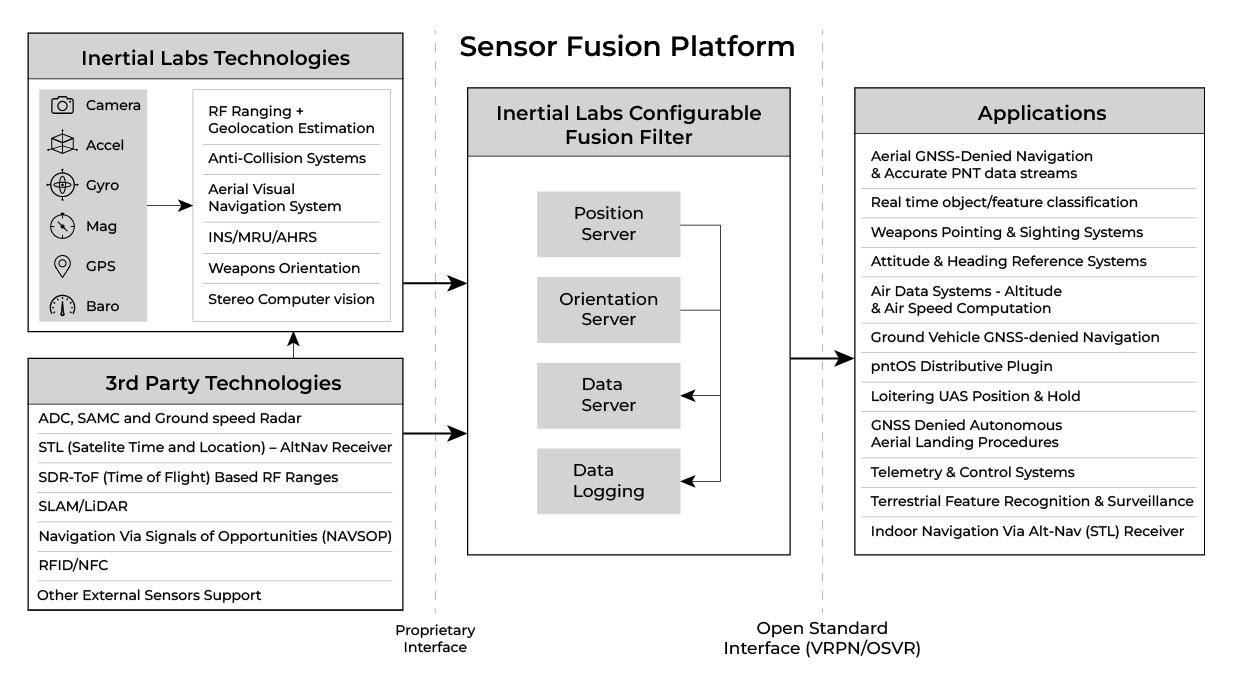 Figure 14. Sensor Fusion Platform.
Figure 14. Sensor Fusion Platform.
The platform supports many sensors thanks to standard interfaces: CAN, RS-232/422, and Ethernet. Thanks to this, the system can be used for various GNSS-denied environments. Whether for marine, airborne, surface, or even underground applications.
An integrated approach ensures reliability and stability in the most hostile environments. We offer a wide range of equipment for various applications, so you can always contact us, and we will help you find the best solution.
Conclusion
In the absence of GNSS signals, using advanced navigation technologies becomes vital to ensure the uninterrupted operation of autonomous systems. Integrating high-precision Inertial Navigation Systems (INS) helps maintain stable navigation by compensating for short-term signal loss. Visual Inertial Odometry (VIO) and Visual Positioning System (VPS), which harness the power of computer vision, allow the system to analyze visual signs of the environment and steer the system confidently along its route. However, maximum reliability is provided by Sensor Fusion, which combines data from various sensors such as INS, cameras, and LiDAR to create a single, ultra-accurate view of position and motion. These techniques help significantly improve the reliability of autonomous solutions, ensuring safe and efficient movement even in challenging environments.
Inertial Labs offers advanced solutions to support autonomous navigation without GNSS signals. The innovative Sensor Fusion-based platform integrates data from various sensors, including inertial modules, high-resolution cameras, barometers, encoders, and more, to provide ultra-precise real-time positioning. These technologies minimize error accumulation and adapt to complex scenarios, ensuring autonomous devices’ reliable operation and safety in any environment.
References
[1] Wikipedia Contributors. “Kalman Filter.” Wikipedia, Wikimedia Foundation, 27 Mar. 2019, en.wikipedia.org/wiki/Kalman_filter.
[2] “INS – GPS-Aided Inertial Navigation Systems.” Inertial Labs, 13 Aug. 2024, inertiallabs.com/products/ins-inertial-navigation-systems/.
[3] Mendez, Maria. “GNSS and INS Tight-Coupling – Why Does It Matter?” Inertial Labs, 15 Oct. 2024, inertiallabs.com/gnss-and-ins-tight-coupling-why-does-it-matter/. Accessed 14 Nov. 2024.
[4] Mendez, Maria. “What Is PNT? Introduction to Position, Navigation, and Timing.” Inertial Labs, 17 Oct. 2024, inertiallabs.com/what-is-pnt-introduction-to-position-navigation-and-timing/. Accessed 14 Nov. 2024.
[5] Kaczmarek, Adrian, et al. “Experimental 2D Extended Kalman Filter Sensor Fusion for Low-Cost GNSS/IMU/Odometers Precise Positioning System.” Measurement, vol. 193, Apr. 2022, p. 110963, https://doi.org/10.1016/j.measurement.2022.110963.
[6] Sasiadek, J.Z., and P. Hartana. “Sensor Fusion for Dead-Reckoning Mobile Robot Navigation.” IFAC Proceedings Volumes, vol. 34, no. 4, May 2001, pp. 251–256, https://doi.org/10.1016/s1474-6670(17)34304-5. Accessed 20 Jan. 2020.
[7] Rudenko, Roman. “Tunnel Guide” Feature for GPS-Aided INS Improves Performance during GNSS Outage.” Inertial Labs, 27 July 2020, inertiallabs.com/tunnel-guide-feature-for-gps-aided-ins-improves-performance-during-gnss-outage/. Accessed 4 June 2023.
[8] Mendez, Maria. “Advancements in Sensor Fusion Technology.” Inertial Labs, 3 June 2024, inertiallabs.com/advancements-in-sensor-fusion-technology/.
[9] Mendez, Maria. “Integrating INS with Aiding Data Technologies – the INS Ecosystem RoadMap.” Inertial Labs, 29 Apr. 2024, inertiallabs.com/integrating-ins-with-aiding-data-technologies-the-ins-ecosystem-roadmap/.





