Advanced Sensor Fusion Platform (INS-NV)
The Inertial Labs NVIDIA Platform based Inertial Navigation System (INS-NV) is the most advanced, modular and innovative inertial navigation system (INS) aided compute platform developed by Inertial Labs. INS-NV is the result of over 25 years of our experience in development of Inertial Navigation Systems solutions, signals of opportunities (SoOp) aided Alternative Navigation Algorithms (RF Ranging from Software Defined Radios (SDR) or STL signals from Iridium PNT) and Machine Vision Algorithms to be used in GPS-denied, Jamming and Spoofing Environments.

INS-NV Performance Specifications
| Parameter | GNSS-Enabled | GNSS-Denied |
|---|---|---|
| Horizontal Position (VIO) | 1 meter | <1% DT |
| Horizontal Position (VPS) | 1 meter | <35 meters |
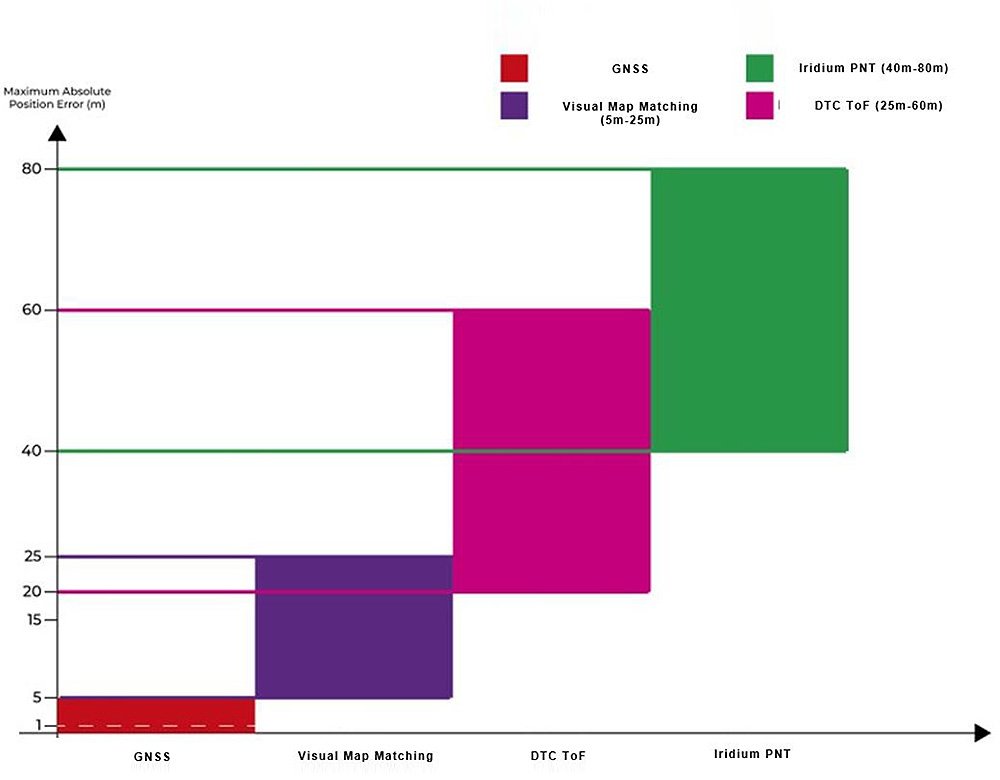
| Horizontal Position with RF Ranging aiding data | 1 meter | <60 meters |
| Horizontal Position with Iridium PNT aiding data | 1 meter | <80 meters |
| Vertical Position | 2 meters | <5 meters |
| Velocity | 0.03 m/sec | <1 m/sec |
| Heading | 0.1 deg | <1 deg |
| Pitch & Roll | 0.03 deg | <0.1 deg |
INS-NV is offered as an OEM or enclosed version. The NVIDIA-INS module consists of a fully integrated, Inertial Navigation System (INS) + Attitude & Heading Reference System (AHRS) + GNSS Receiver and NVIDIA Orin NX processor on a Hadron Carrier board. The platform is a high-performance strapdown system, that determines position, velocity and absolute orientation (Heading, Pitch and Roll) for Fixed-wing, VTOL and Multirotor Unmanned Aerial Vehicles. Horizontal and Vertical Position, Velocity and Orientation are determined with high accuracy for both motionless and dynamic applications, in GPS-enabled and GPS-denied environments. Moreover, optional add-ons from the Inertial Labs Aiding Data Ecosystem (IL-ADE) can be used as additional aiding data sources to increase a vehicle’s reliability when navigating congested GNSS environments.
INS-NV is one of the most sophisticated Navigation Solutions and APNT sensor fusion modules on the market which allows Unmanned Aerial Vehicles to accomplish critical missions in congested GNSS environments. Top Attributes of the INS-NV:
Top Attributes of the INS-NV:
- Fully integrated navigation solution designed specifically for GNSS-denied and BLOS applications
- User defined output allows for interoperability with various sUAS/UAS platforms deployed
- Modular architecture allows end user to choose the types of aiding data for any mission
- Provides flight controller with continuous jamming and spoofing resilient orientation, position, velocity, and timing (OPVT) data.
- Readily available USB & Ethernet ports to support external sensors (e.g. cameras)
- Compatible with IL-VIU (Inertial Labs Visual Inertial Unit) – a fully calibrated miniAHRS and camera module in day/IR variants.
- User defined output allows easy inclusion in any Open System Architecture (xOSA)
- Custom development environment for user specific needs to meet mission critical objectives (i.e. ATR – Automatic Target Recognition, Reconnaissance & Surveillance, etc.)
Layers-of-reliability
The INS-NV is embedded with a NVIDIA Orin NX Pprocessor which houses a development environment for pre-configured software for users to plan, control and log fusion data from all the different aiding data sources that are used with the INS’s real time sensor fusion (Kalman filtering) algorithm. Users also have the ability to deploy their own custom developments and leverage the use of Inertial Labs’ robust sensor fusion algorithm for custom software development that may be required for applications pertaining to Automatic Target Recognition (ATR), Assured PNT or other mission critical objectives. INS-NV gives vehicles multiple layers of reliability with its versatile APNT algorithms and modular design that promise to integrate with any type of land, sea or aerial vehicle effortlessly.
External Aiding Data Sources (Inertial Labs’ Aiding Data Ecosystem – IL ADE)
The Inertial Labs robust sensor fusion Kalman Filter algorithm is capable of seamlessly switching from aiding data streams depending on the environmental factors of a given mission to continuously provide a resilient GNSS-denied positioning solution. Note: INS-NV is capable of operating with any component of the IL-ADE (Upon Request).
- Iridium PNT (ALTNAV Receiver): The Iridium PNT receiver (STL-2600) provides SVI (Space Vehicle Information) data in a “PJLTSVI” message format, which provides the INS’ tightly coupled filter with doppler, signal time of arrival (TOA), pseudo ranges, carrier-to-noise ratio, and satellites’ orbital position and velocity vectors.
When these raw observables are injected into a mathematical model that correctly propagates the receiver and system state with each valid time increment, the Inertial Labs tightly coupled navigation filter can then estimate precise vehicle position within static and dynamic applications.
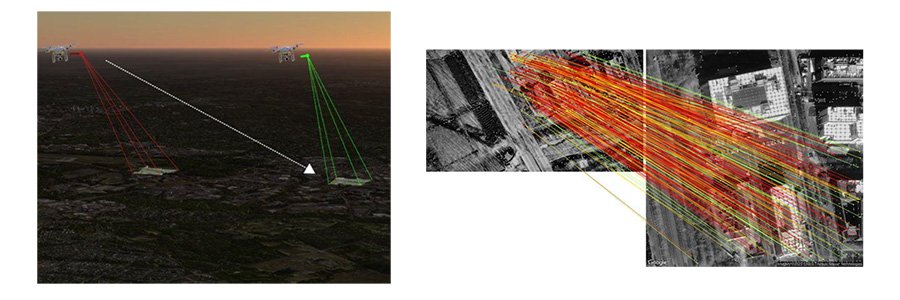
- DTC BluSDR RF Ranging: Inertial Labs INS-based RF Ranging with DTC SDR uses SoOP (Signals of Opportunities) to triangulate an aerial vehicle’s position in complete GNSS-denied environments. DTC’s LPI/LPD (Low Probability of ntercept/Detection)- based RF technologies significantly reduce the chances of jamming/spoofing RF signals.
Live RF-based ranges can be easily viewed and tracked on a real-time map by accessing the mission computer’s web panel during any stage of an operational mission. This feature provides end users with complete visibility over the system’s operating state to achieve mission objectives.

- Visual Navigation:
- VIO – Visual Inertial Odometry is a visual aiding algorithm that estimates accurate ground speed by observing gradual changes in captured terrain imagery at low or high altitudes.
- VPS – Visual Positioning System is real-time map matching of features. VPS produces 3D position estimates (<25m RMSE) that are provided as aiding data to the onboard INS’s Kalman filter.
Related Products
APNT Solutions

INS-U
VINS

IRINS
Trademark Legal Notice: All product names, logos, and brands are the property of their respective owners. All company, product, and service names used in this document are for identification purposes only. Use of these names, logos, and brands does not imply endorsement. ABS, BeiDou, Cobham Limited, EdgeTech, Galileo, GLONASS, GPS, Hexagon, HYPACK, IMAGENEX, Kongsberg Seatex, LabVIEW, Livox, Norbit, NovAtel, NovAtel Inertial Explorer, Ouster, Qinsy, Quanergy, QZSS, R2Sonic, RIEGL, ROCK Robotic, ROS, Septentrio, Ship Motion Control SMC, Teledyne TSS, u-blox, Velodyne, WAASP, Waypoint.