
Abstract
This article discusses the basic operating principles and technologies underlying Global Navigation Satellite Systems (GNSS). The essential components of GNSS are described, including satellite constellations, ground infrastructure, receivers, and various positioning techniques such as Differential GNSS (DGPS) and Real-Time kinematics (RTK). The article also explains the effects of the ionosphere, multipath distortion, and other factors on signal accuracy. It describes correction and accuracy enhancement methods, including using Satellite-Based Accuracy Augmentation Systems (SBAS), Precise Point Positioning (PPP), and other technologies. The paper concludes with a discussion of advanced solutions to combat the effects of spoofing and jamming, multipath, and other factors that reduce positioning accuracy.
The sections will be covered: Introduction to GNSS, Principles of GNSS, Improving GNSS accuracy, and Technologies from Inertial Labs. The conclusion will summarize the limitations of GNSS and how Inertial Labs™ solutions can help you navigate without a GNSS signal.
Introduction to GNSS
What is GNSS?
Global Navigation Satellite System (GNSS) – is a system that consists of constellations of satellites orbiting the Earth on predetermined trajectories. The satellites send a signal with orbit information and precise time (as well as additional information) to special receivers, which receive, decode, and calculate their location [1].
At least four satellites must be directly in sight to calculate the position. Three are needed to calculate coordinates, and the fourth is required to correct the clock. The position determination method in this way is called trilateration [2]. It will be described in more detail below.
What is a Global Navigation Satellite System?
Very often, “GPS” (Global Positioning System) is used instead of the abbreviation “GNSS”. However, this is only partially correct if we are talking about all constellations because GPS is one of the GNSS constellations that was put into operation by the United States.
As of 2024, the following constellations are functioning: GPS (United States’s Global Positioning System), GLONASS (Russia’s Global Navigation Satellite System), BDS (China’s BeiDou Navigation Satellite System) and Galileo (European Union’s Satellite System), Figure 1 [3].
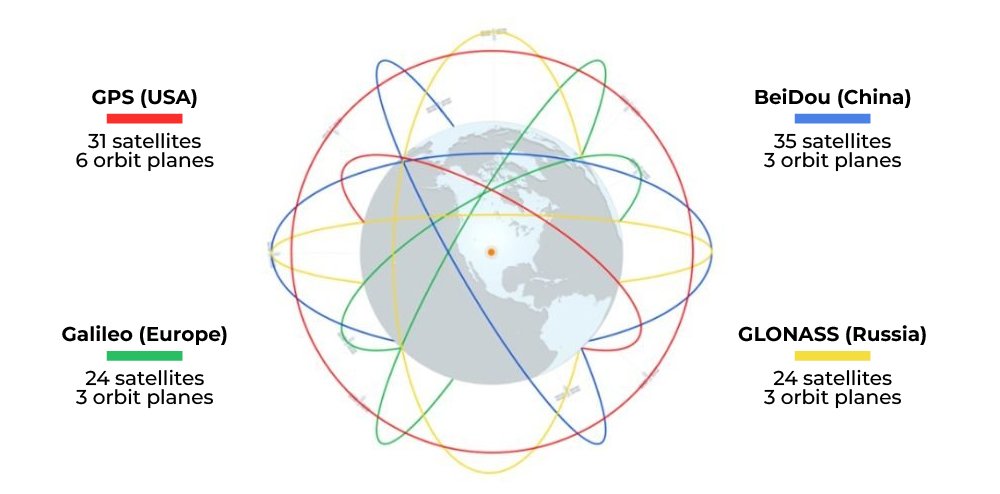 Figure 1. 4 GNSS constellations.
Figure 1. 4 GNSS constellations.
In addition to the four global systems, there are regional systems: QZSS (This is a regional Japanese Quasi-Zenith Satellite System) and NavIC (This autonomous system for the Indian region) [3]. Regional satellite systems are used for communication, navigation, surveillance, and monitoring in a particular area.
GNSS consists of three main segments, Figure 2:
- Space segment. GNSS satellites broadcast a signal from space, and all GNSS receivers use this signal to calculate their position in space from three coordinates in real-time [4].
- Control segment. The control segment consists of ground base stations. They help correct satellite data, considering atmospheric and other errors and improving navigation accuracy [4]. The stations monitor the status of satellites and their orbits and provide updates on the GPS status. They can also transmit corrections for local errors, allowing users (e.g., in agriculture or surveying) to obtain more accurate coordinates. They collect data for research in geodesy, geophysics, and other sciences, which allows you to track changes in the Earth’s surface and conduct other studies.
- User segment. A user segment consists of millions of GPS receivers owned by ordinary users [4].
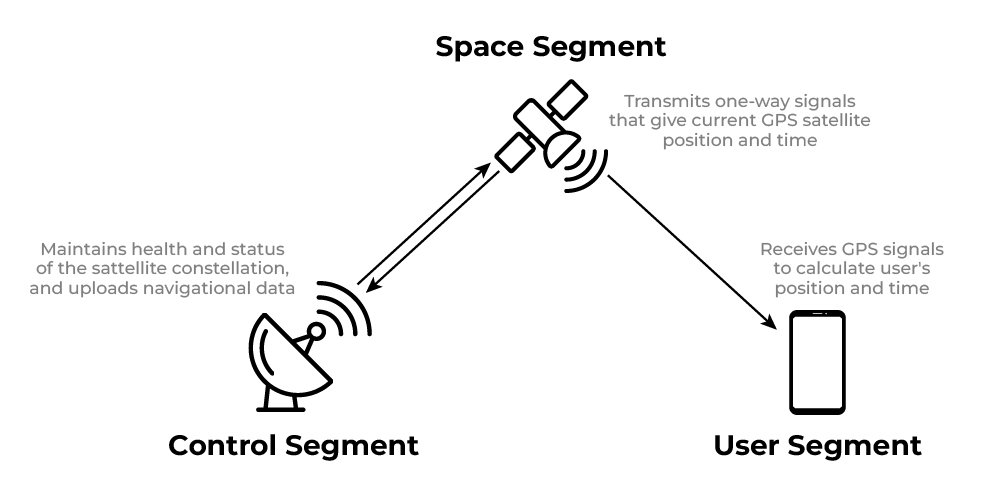 Figure 2. GNSS Segments.
Figure 2. GNSS Segments.
Now, let’s look at a brief historical background of the main stages of the appearance and development of GNSS.
Key stages and milestones in the development of GNSS
The USA and the USSR took the first steps towards creating satellite navigation systems in the late 1950s. In 1957, the Soviet Union launched the «Sputnik 1» satellite, and US scientists discovered that they could track its signal to determine the position of an observer on Earth. This principle became the basis for future navigation systems [5]. In the 1960s, the US created the Transit system, designed for military purposes, particularly submarine navigation. Transit used satellites in low orbits but had limited accuracy and slow data update times. In the 1970s, the US began developing a new satellite system to provide more accurate and reliable navigation coverage. This system was called GPS (Global Positioning System). The first GPS satellite was launched in 1978 as part of the NAVSTAR program. At the same time, the Soviet Union began developing its global navigation satellite system, GLONASS (Global Navigation Satellite System). The first GLONASS satellite was launched in 1982, and the program continued to develop until the collapse of the Soviet Union. In the early 1990s, GPS began to be used by the military and civilian users [5]. The system was gradually deployed, and by 1993, it had reached an operational level with 24 satellites, providing global coverage. In 1995, the GPS was officially declared fully operational. It became popular among civilian users for navigation, surveying, aviation, maritime, and other purposes. As technology developed and the need for accurate navigation increased, other countries and international organizations began developing their GNSS. In 2003, Galileo’s development of the European satellite navigation system started. The first satellites were launched in 2011, and the system officially became operational in a limited mode in 2016. Galileo is designed to provide more accurate data and independence from GPS and GLONASS. China has also been developing its navigation system [5]. In the 2000s, work began on the BeiDou system, and by 2020, it had achieved global coverage and became a full-fledged alternative to other GNSS. In addition, GPS and GLONASS have gone through several stages of modernization to improve accuracy and reliability. In 2000, the United States turned off Selective Availability, a feature that intentionally reduced the accuracy of the civilian GPS signal. This significantly improved accuracy for civilian users. The GLONASS system was modernized and restored in Russia by 2010, providing complete global coverage.
As can be seen, the development of satellite navigation has come a long way from its inception to the present day. Ease of use and availability globally have made GNSS an indispensable assistant in many areas, which will be briefly described below.
Applications of GNSS
GNSS plays a crucial role in today’s world due to its ability to determine the exact location of objects [6]. Here are a few of its main applications:
- Transport and logistics. GNSS helps navigate and plan routes for all types of transport: land, air, and sea.
- Agriculture (precision farming). GNSS automates agricultural machinery, allowing for precise sowing, fertilization, and harvesting. This increases efficiency and reduces costs. It also collects data on the condition of fields and plants, making optimizing the management of resources such as water and fertilizers possible.
- Geodesy and cartography. GNSS is widely used in geodesy to accurately determine coordinates, create maps, and monitor movements of the Earth’s crust and changes in natural landscapes. Modern technologies make it possible to achieve measurement accuracy down to the centimeter level.
- Construction and engineering. GNSS is used to construct buildings, roads, bridges, and other infrastructure for precise positioning and work control.
- Civil safety and emergency services. GNSS is used in search and rescue operations to determine the exact location of people in trouble, especially in remote and hard-to-reach areas. It also tracks and coordinates emergency services such as police, ambulances, and fire services.
- Telecommunications and time synchronization. GNSS is essential in providing accurate time synchronization, which is necessary for telecommunications networks and financial transactions.
- Military applications. GNSS is used for navigation and control of military equipment such as aircraft, tanks, and ships, as well as missile and unmanned aerial systems for precision guidance.
Thus, in the modern world, satellite navigation has become an integral part of our lives. The following section will examine how GNSS works and what factors and limitations affect the system’s accuracy.
Principles of GNSS
Satellite orbits and their positions
GNSS satellites are in mid-orbit altitudes, providing optimal coverage and accuracy for global navigation [7]. Depending on the system, the orbits may vary slightly, but generally, they are about 20000 km above Earth’s surface.
Below are the basic orbital parameters for each system:
- GPS
- Orbit: Medium Earth Orbit (MEO).
- Altitude: About 20200 km.
- Number of satellites: 31 (with reserved satellites).
- Orbital planes: 6, with an inclination of about 55 degrees to the equator.
- Satellite rotation time is about 12 hours.
- GLONASS
- Orbit: Medium Earth Orbit (MEO).
- Altitude: About 19100 km.
- Number of satellites: 24 (8 satellites in the three orbital planes).
- Orbital planes: 3, with an inclination of about 64.8 degrees to the equator, gives an advantage in northern latitudes.
- Satellite rotation time is about 11 hours 15 minutes.
- Galileo
- Orbit: Medium Earth Orbit (MEO).
- Altitude: About 23222 km.
- Number of satellites: 30 (including spare satellites).
- Orbital planes: 3, with an inclination of 56 degrees to the equator.
- The time for a complete satellite revolution is about 14 hours.
- BeiDou (uses a combination of orbits)
- MEO (Medium Earth Orbit): The satellites are about 21150 km, with an inclination of about 55 degrees.
- GEO (Geostationary Orbit): Some satellites are at an altitude of 35786 km and remain stationary relative to the Earth.
- IGSO (Inclined Geosynchronous Orbit): At an altitude of about 35786 km, but with an inclination of 55 degrees to improve coverage at high latitudes.
- Number of satellites: 44
- As a result, this combined structure provides global coverage and more accurate navigation in the Asia-Pacific region.
Now, let’s look at the operating principle of GNSS technology and understand why four satellites are needed to determine the position.
Signal transmission and distance calculation
The principle of satellite navigation is based on measuring the signal transmission time from the satellite to the receiver [8]. Time ![]() is multiplied by the speed of light, thus determining the distance. Neglecting errors, the actual range from the satellite to the receiver will be defined as (1):
is multiplied by the speed of light, thus determining the distance. Neglecting errors, the actual range from the satellite to the receiver will be defined as (1):
 (1)
(1)
Where ![]() is the time marked in the satellite position information tag received by the receiver;
is the time marked in the satellite position information tag received by the receiver; ![]() is the receiver’s clock when receiving the satellite data.
is the receiver’s clock when receiving the satellite data.
Taking range measurements ![]() from i satellites (i = 1.4), the position of the receiver can be calculated as (2):
from i satellites (i = 1.4), the position of the receiver can be calculated as (2):
 (2)
(2)
where ![]() is the position of the i-th satellite in the ECEF coordinate system now of transmission time known from the ephemeris;
is the position of the i-th satellite in the ECEF coordinate system now of transmission time known from the ephemeris; ![]() is the position of the receiver in the ECEF coordinate system, which must be determined.
is the position of the receiver in the ECEF coordinate system, which must be determined.
Equation (2) describes the user’s position through four spheres. The observed range gives the radius of each of them, and the center corresponds to the satellites. These spheres intersect at the point of the receiver’s position, as shown in Figure 3.

Figure 3. The intersection of the four spheres.
True range ![]() is also called geometric range. Now, let’s discuss why precisely four satellites are needed to determine a position. The distance to one satellite determines that the object is somewhere on the surface of a sphere around the satellite [8]. The second satellite narrows the possible location to a circle (the intersection of two spheres). The third satellite narrows it down to two possible points (the intersection of three spheres), one of which is usually in space and is excluded, as shown in Figure 4. Thus, three satellites can determine latitude, longitude, and altitude, which is insufficient for complete certainty.
is also called geometric range. Now, let’s discuss why precisely four satellites are needed to determine a position. The distance to one satellite determines that the object is somewhere on the surface of a sphere around the satellite [8]. The second satellite narrows the possible location to a circle (the intersection of two spheres). The third satellite narrows it down to two possible points (the intersection of three spheres), one of which is usually in space and is excluded, as shown in Figure 4. Thus, three satellites can determine latitude, longitude, and altitude, which is insufficient for complete certainty.

Figure 4. Difference between one, two, and three observations.
The receiving devices do not have atomic clocks found on the satellites, so their time accuracy could be better [9]. Even a tiny error in measuring time leads to significant errors in calculating the distance to the satellites and, therefore, determining the coordinates. The fourth satellite is needed to correct the time. It allows the receiver to simultaneously solve equations for three spatial coordinates and time, which gives precise location and time synchronization, Figure 5. In addition, the receiver’s position is determined uniquely by the fourth dimension.

Figure 5. Unambiguous determination of position using four satellites.
The Doppler range velocity ![]() measurement is described in the same way to determine the receiver velocity (3):
measurement is described in the same way to determine the receiver velocity (3):
 (3)
(3)
where ![]() is the range rate;
is the range rate; ![]() is the satellite velocity,
is the satellite velocity, ![]() is the desired receiver velocity, and is the receiver position obtained from (2).
is the desired receiver velocity, and is the receiver position obtained from (2).
The receiver position is defined in the ECEF coordinate system, but for practical use, the receiver usually transforms the coordinates into a geographic coordinate system.
Atomic clock and pseudo ranges
As mentioned earlier, satellites have an atomic clock. Their function is to accurately determine the time, with an error measured in nanoseconds. This accuracy is critical because GNSS receivers calculate their position by measuring the time it takes for a signal to travel from the satellite to the receiver [10, 11]. Since the signal travels at the speed of light (approximately 300000 km/s), even a small error in time measurement (for example, one millisecond) can lead to a significant error in determining the position (up to 300 meters). This is easily determined from formula (1). Let us denote ![]() a geometric range with an error caused by clock inaccuracy
a geometric range with an error caused by clock inaccuracy ![]() ; after substituting the numbers, we get:
; after substituting the numbers, we get:

The GNSS receiver generates the same code as the satellite to determine the signal delay time and calculate the distance to the satellite. This is called pseudorandom code correlation. Each GNSS satellite transmits a unique pseudorandom code repeated at short intervals (e.g., every millisecond for GPS). The receiver has copies of these codes for each satellite and synchronizes them with the signals coming from the satellites. When the receiver receives a signal from a satellite, it matches its own generated code to the received signal, Figure 6.

Figure 6. The correlation processes.
The correlation process (alignment) allows us to determine the time difference between the transmission of the code by the satellite and the reception of this signal by the device. This time difference, multiplied by the speed of light, gives the distance to the satellite. Knowing the exact time when the satellite sends the signal and calculating the delay based on the correlation of the codes, the receiver determines its distance from the satellite.
However, the time shift found using correlation has an error associated with the lack of perfect synchronization between the satellite clocks and the receiver. Receivers use satellite signals to calibrate their internal clock, which allows them to eliminate errors in measuring time. However, only partially because after calibrating the time, the receiver’s clock drifts a little, which leads to mistakes. Imperfections in the receiver oscillators cause these errors. Accordingly, the generated codes cannot be perfectly synchronized either. In other words, the time shift contains the signal time from the satellite to the receiver and clock errors.
The clock offset introduces an error in the range measurement, and these observed range measurements are called pseudoranges (4) [8].
 (4)
(4)
where ![]() the pseudo-range is measured to the i-th satellite;
the pseudo-range is measured to the i-th satellite; ![]() the error is due to the receiver clock’s offset relative to the i-th satellite’s clock.
the error is due to the receiver clock’s offset relative to the i-th satellite’s clock.
The clock offset is treated as an unknown variable to compensate for the significant error caused by the time mismatch between the receiver and the satellites. It is calculated simultaneously with the three-dimensional position based on the pseudoranges obtained from the four satellites. Since the time correction is performed at each measurement update, there is no need to use highly stable, expensive clocks in the receivers.
In addition to the clock error, the signal passing through the atmosphere is affected by additional sources of error, such as the drift of the satellite’s position in orbit, the ionosphere and troposphere, and the influence of the conditions in which the receiver is located, Figure 7.

Figure 7. Sources of GNSS signal errors.
Taking these errors into account, the expression for pseudo-range will take the form (5):
 (5)
(5)
where ![]() is the satellite position error in orbit;
is the satellite position error in orbit; ![]() is the ionospheric error;
is the ionospheric error; ![]() is the tropospheric error;
is the tropospheric error;  is the receiver noise;
is the receiver noise; ![]() is the multipath error.
is the multipath error.
The influence of factors on location determination accuracy is given in Table 1.
| Error type | Range, m | Notes |
| Orbital | ±2.5 | Minor deviations in the satellite’s position in orbit lead to large errors in determining the receiver’s position on Earth |
| Ionospheric | ±5 | The upper atmosphere contains many electrons due to the ionization of the layer by solar radiation. This layer can slow down and reflect the signal. |
| Tropospheric | ±0.5 | Lower layers can refract the signal due to humidity and density. |
| Timing | ±2 | Drifts in the receiver’s clock lead to position determination errors. |
| Multipath | ±1 | The signal is reflected from buildings or other objects, reaching the receiver later than the unreflected signal. This leads to errors in distance measurements. |
| Receiver noise | ±0.3 | The software and hardware solutions in the receiver are not ideal, due to which noise occurs, which contributes its components to the signal. |
Table 1. The influence of factors on the accuracy of location determination.
In this paper, we have not touched upon such an important aspect as the signal structure, but interested readers can find this information at the links [12, 13].
After we have dealt with the sources of errors and pseudoranges, we will consider the technologies and methods for increasing the accuracy of GNSS positioning.
Improving GNSS accuracy
Precision and accuracy
Before considering the methods and technologies for increasing the accuracy of GNSS positioning, let us dwell in more detail on the concept of precision and accuracy [14]. To understand the difference between precision and accuracy, consider Figure 8. In the first case, 1, the points are scattered throughout the target, i.e., the degree of proximity of the measured value to the actual value is very far, and the measurements have no repeatability. In the second case 2, excellent repeatability is observed, but the points are far from the center of the target, i.e., from the actual value. In the third case, points are close to the center, but there is no clustering or repeatability. Finally, in case 4, all the points are at the center of the target, with good accuracy and precision.
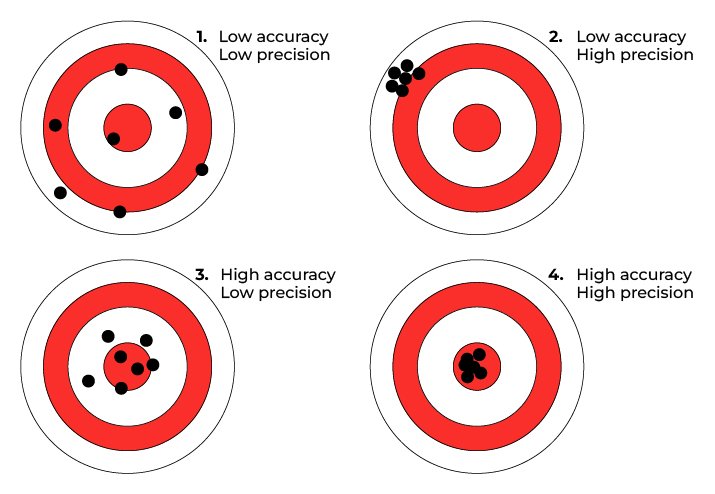 Figure 8. The difference between precision and accuracy.
Figure 8. The difference between precision and accuracy.
This simple example demonstrates the difference between precision and accuracy on targets, but the picture is the same. In other words, this can be described as absolute and relative errors. In case 3, the absolute error is minimal, but the relative error is high, while in case 2, it is the other way around. Ideally, a GNSS receiver should provide both precision and accuracy, but this is only sometimes the case due to the above factors and limitations. Next, we will consider additional factors and sources of errors that affect position determination accuracy.
Limitations and sources of GNSS signal errors
Natural limitations include a lack of signal indoors, in tunnels, underground, and multipath.
In ideal conditions, the signal from the satellite goes directly to the receiver without any obstacles. In natural conditions, the signal often collides with surfaces such as buildings, trees, water, or other objects, reflecting off them. As a result, the receiver can receive both a direct signal and one or more reflected signals, as shown in Figure 9 [15].
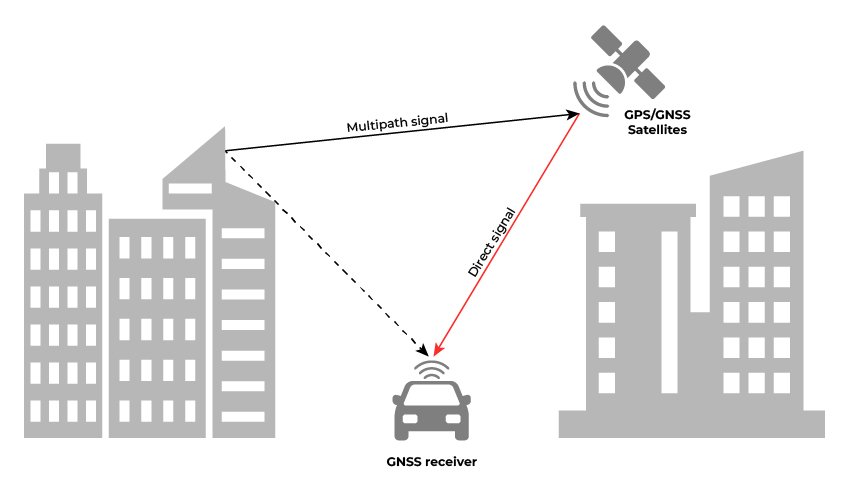 Figure 9. Multipath.
Figure 9. Multipath.
Since the reflected signal travels a longer path, it arrives with a delay compared to the direct signal. This can mislead the receiver and lead to errors in determining the distance and position.
In addition to the factors considered, which are mainly of natural origin, there are additional ones caused by artificial means.
- Jamming. The attacker uses strong radio signals on the same frequencies as GNSS signals, creating interference and preventing the receiver from receiving data from the satellites, Figure 10 [16]. Unlike spoofing, jamming does not attempt to change the location or time; it simply prevents the receiver from receiving signals and, therefore, determining coordinates. This can lead to a complete failure of the navigation system.
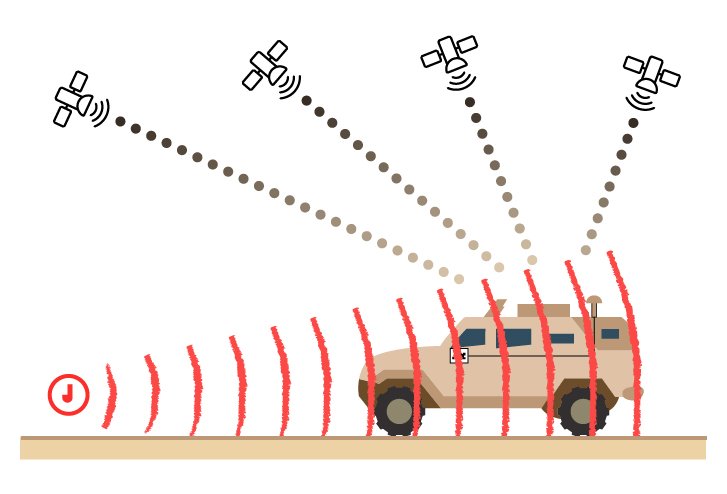 Figure 10. Jamming.
Figure 10. Jamming.
Signal spoofing. This deceives the GNSS receiver by transmitting fake signals that imitate accurate satellite signals [16]. The attacker transmits signals that imitate natural satellites but with changed parameters, such as time or coordinates. Upon receiving such a signal, the receiver may erroneously determine its location or time, which leads to distorted or incorrect data. For example, the attacker can point the receiver to the wrong place to knock a ship or vehicle off course, Figure 11.
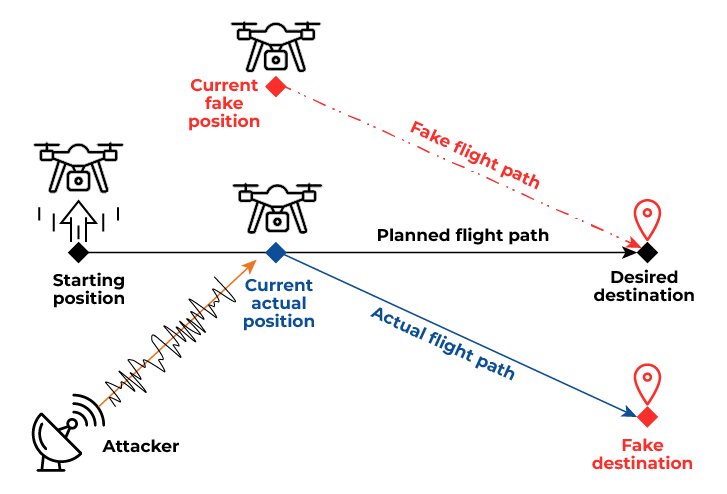 Figure 11. Spoofing.
Figure 11. Spoofing.
Methods for Improving GNSS Positioning Accuracy
The accuracy of standard GNSS receivers without additional correction and improvements is 5-10 meters in the horizontal plane. Various methods and technologies are used to minimize errors and improve location data to improve the accuracy of GNSS positioning. The most popular ones are listed below:
GNSS Corrections
All correction methods are generally based on Differential GPS (DGPS), Figure 12. Single-point positioning uses one receiver. Differential GPS uses at least two receivers [17]. One of the receivers (the base) is stationary and located in a known location.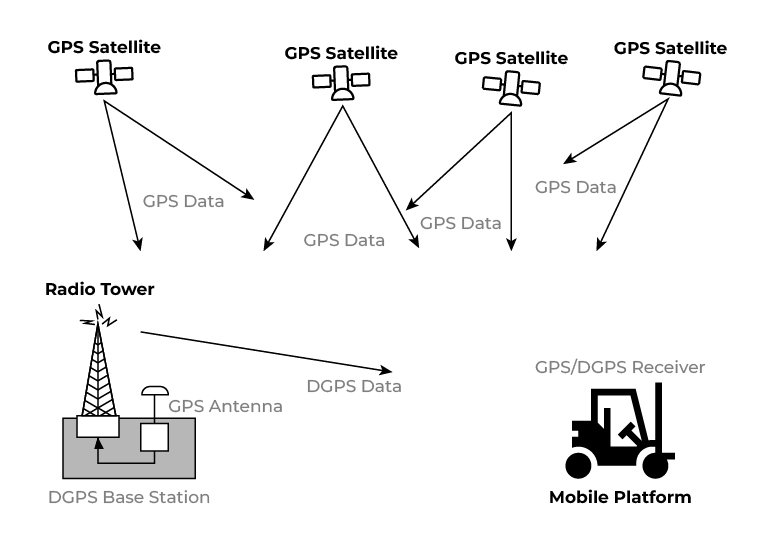 Figure 12. DGPS Principles.
Figure 12. DGPS Principles.
Both receivers receive signals from the same satellite constellations at the same time. The distance between the base and the rover (baseline) is much shorter than from the receiver to the satellite (20000 km). This creates a correlation between the base and the rover, so both receivers register similar errors. And since the position of the base is known, it is possible to generate corrections that are used to improve the accuracy of the rover’s position. This is especially effective at short distances from the base station. Let’s return to Figure 6, which shows the principle of correlation. Measurements using a digital signal can be as accurate as the timing of the satellite and receiver. Since the signal does not repeat, it is straightforward to determine how far away the satellite is simply by knowing how much the speed of light offsets the data. The main difference between DGPS and RTK, which we will look at next, is that DGPS uses coded observations. Let’s look at Figure 13, which shows the satellite and receiver signals, which are slightly out of phase. But if you compare them logically, they are the same. When the satellite signal is one, the receiver signal is one. When the satellite signal is zero, the receiver signal is zero. Notice that the satellite signal is slightly ahead of the receiver signal. You can shift the satellite signal almost half a cycle forward, and the signals will still logically coincide.
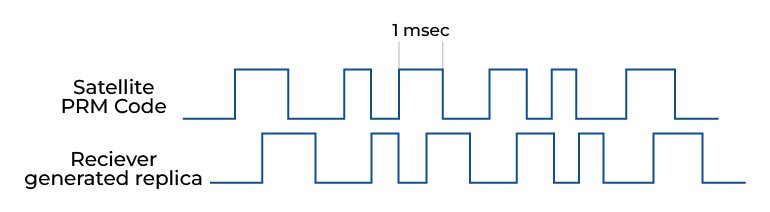 Figure 13. Logical synchronization of satellite and receiver signals.
Figure 13. Logical synchronization of satellite and receiver signals.
This is the peculiarity of code observations when pseudorandom codes with a cycle width of almost a microsecond are compared. And as we discussed earlier, 1 microsecond is nearly 300 meters of error. Due to imperfect synchronization, the method improves the accuracy to the level of decimeters (0.1-0.5 meters).
- An improved option is Real-Time Kinematic (RTK). RTK is a particular type of DGPS. RTK uses a principle like DGPS but uses phase observations [18]. Let’s look at Figure 14, which shows the signal structure. The GNSS signal consists of a radio frequency carrier, a unique binary code with pseudorandom noise (PRN), and a binary navigation message.
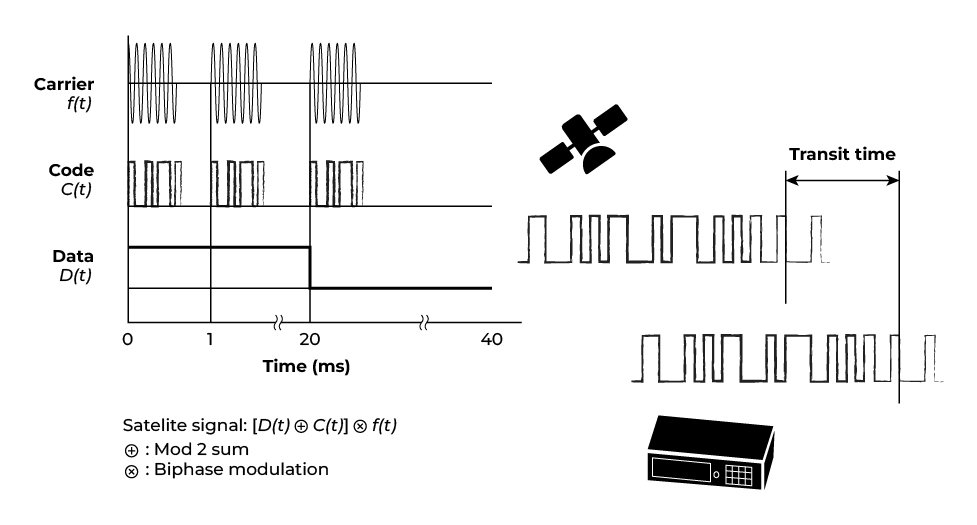 Figure 14. GNSS signal structure.
Figure 14. GNSS signal structure.
As can be seen, the carrier has a much higher frequency than the PRN; for example, for GPS L1, the frequency is 1575.42 MHz. According to the formula for wavelength (6), the wavelength would be 19 cm.
 (6)
(6)
The pseudorandom code has a bit rate of about 1 MHz, but its carrier frequency has a cyclic rate of more than GHz. Therefore, the carrier signal can be a much more accurate reference than the pseudorandom code. The phase measurement is usually expressed in cycles, and the distance can be calculated more accurately than with code measurements.
Float RTK means that the phase ambiguities (whole numbers representing the number of wavelengths between the satellite and the receiver) have yet to be accurately determined. Instead, these values are left as fractional (non-integer) numbers. The accuracy in this mode is typically a few tens of centimeters. Float RTK is used as an intermediate solution when the algorithm cannot clearly determine the ambiguities, but obtaining coordinates with sufficient accuracy for most tasks is already possible.
Integer RTK means phase ambiguities have been successfully resolved, and the values are defined as integers. This allows you to accurately determine the exact distance from the receiver to the satellites. In some cases, the accuracy in Integer RTK reaches several centimeters and even millimeters. This mode is more accurate and reliable than Float RTK but requires a high-quality signal and sufficient time to resolve ambiguities. In this regard, the “Carrier-phase” approach is used, the essence of which is as follows: first, an approximate solution is sought using code observations, and then the solution is refined using phase observations. This can be compared to coarse and fine-tuning.
RTK also uses additional frequencies L1 and L2 (including L5). Using additional frequencies increases accuracy and allows for better error correlation. This method provides positioning accuracy of up to 1 cm.
Using code measurements in DGPS and phase measurements in RTK is related to the method, not to a specific type of receiver. Receivers can be universal and support both types of measurements, but the choice of method depends on the goals and accuracy requirements. The advantage of DGPS is that it is faster and easier to configure than RTK. However, for modern, powerful computers, the speed of RTK data processing does not present any difficulties.
Precise Point Positioning (PPP) is a high-precision positioning method using global navigation satellite systems (GNSS), which allows determining the receiver’s coordinates with centimeter accuracy without the need for a local base station, as in RTK [19]. Instead, PPP uses exact data on satellite orbits and corrections to their signals provided by global services.
To calculate precise coordinates in PPP, the receiver uses not only data from satellites but also exact corrections, which include Precise satellite orbits (Precise Ephemerides) – information on the location of satellites, updated and provided by global centers (for example, IGS – International GNSS Service). Corrections to satellite clocks, i.e., data on the offset of time marks, allow compensation for errors in measuring time on satellites—ionospheric and tropospheric corrections.
PPP uses a phase measurement method similar to RTK, which allows for high accuracy. However, unlike RTK, PPP does not use a local base station to transmit differential corrections; instead, it relies on global data. This data can be obtained from SBAS (Satellite-Based Augmentation Systems) satellites or via an Internet connection (NTRIP, mobile Internet), as well as via specialized data transmission satellites (e.g., Starlink, Iridium).
In some cases, receivers can download accurate orbital data and corrections in advance from a database via the Internet and then use them in the positioning process. This can be useful for post-processing data when accuracy is not required in real time. For example, IGS and other services provide such data. GNSS receivers can be connected to services that provide global data via a network of ground-based base stations (Trimble RTX, OmniSTAR, etc.).
This approach is instrumental in remote or hard-to-reach areas where deployment of a base station is impossible or difficult. PPP can achieve centimeter or even millimeter accuracy, but it requires a specific initialization time (usually 20 minutes to an hour) during which the receiver collects data and resolves phase ambiguities. In some cases, real-time PPP (RT-PPP) corrections are used, which reduce the initialization time and obtain coordinates faster.
Satellite-Based Augmentation System (SBAS) is a satellite-based system that provides corrections and additional data to improve the accuracy, integrity, and availability of global navigation satellite systems, Figure 15 [20]. SBAS uses a network of geostationary satellites and ground stations to transmit this data to users in real-time. SBAS provides corrections that are broadcast based on data collected from the network of ground stations. These corrections account for and compensate for errors due to satellite positions and signal propagation conditions. SBAS also provides GNSS signal integrity monitoring, which is especially important for mission-critical applications such as aviation. The system continuously monitors satellite signals, and if any problems or errors are detected, SBAS immediately sends a warning to users.

Figure 15. SBAS.
This allows real-time assessment of how accurate and reliable the received coordinates are and their use in safety-critical environments. Geostationary SBAS satellites transmit data in the same frequency range as GNSS (e.g., L-band), so receivers can receive them with GPS or other signals.
There are several regional SBAS systems, each covering specific regions:
- WAAS (Wide Area Augmentation System) — in North America. Managed by the US Federal Aviation Administration (FAA) [20].
- EGNOS (European Geostationary Navigation Overlay Service) — in Europe. Managed by the European Global Navigation Satellite System Agency (GSA) [20].
- MSAS (Multi-functional Satellite Augmentation System) — in Japan. Managed by the Japan Aeronautics and Maritime Navigation Technology Agency [20].
- GAGAN (GPS Aided GEO Augmented Navigation) — in India. Managed by the Indian Space Research Organisation (ISRO) [20].
- SDCM (System of Differential Correction and Monitoring) – in Russia [20].
SBAS is widely used in aviation to improve the accuracy and reliability of navigation during takeoffs, landings, and flights. SBAS can also be used in shipping, land navigation, and geodesy, where high accuracy is required, but there is no need for a centimeter accuracy of RTK.
- Integration with inertial navigation systems (INS). In challenging environments where GNSS signals may be blocked or distorted (such as in tunnels or among tall buildings), GNSS is often combined with inertial navigation systems (INS), which use accelerometers and gyroscopes to determine motion [13]. This allows users to continue determining their location even if GNSS signals are temporarily unavailable.
- Multi-frequency receivers. Modern GNSS receivers can receive signals from multiple constellations on multiple frequencies [21]. Using various frequencies helps compensate for signal distortions in the ionosphere, reducing errors. Multi-frequency receivers provide higher accuracy, immunity to interference, and stability due to the visibility of more satellites simultaneously. They also resolve integer ambiguity more effectively, allowing centimeter-level accuracy to be achieved faster than with single-frequency equipment.
- Interference-resistant antennas. To counteract the effects of jamming and spoofing, special GNSS antennas have been developed with a controlled reception pattern antenna (CRPA) [22]. A CRPA consists of an array of receiving elements (usually several antennas) arranged in a specific configuration (e.g., circular). The main difference between a CRPA and a conventional antenna is that its directivity pattern can dynamically change and adapt to environmental conditions using phasing and signal processing. Each CRPA element receives a GNSS signal. These elements are located at a fixed distance from each other, which allows the antenna to capture signals from different directions. The control system analyzes the phases and amplitudes of the signals arriving at each antenna element. It applies phase shifts and gains to them to change the real-time directivity pattern. Phasing the signals from each antenna element creates a so-called directivity pattern that focuses on sources of proper signals (e.g., GNSS satellites) and simultaneously creates null zones (nulls) in the directions of interference sources. This process is called null-steering (also known as zero-forcing), and it allows CRPA to suppress or minimize signals coming from unwanted directions. CRPA also helps reduce multipath distortion caused by reflected signals (multipath) by directional suppression of signals from unusual angles.
Thus, many technologies and solutions for protecting GNSS systems provide high reliability and resistance to interference, especially in mission-critical applications. The most effective way to use it is an integrated solution that combines different technologies to achieve the best result. Such a solution is the use of devices from Inertial Labs.
GNSS Technologies from Inertial Labs
Imagine a world where your navigation systems operate with maximum accuracy, regardless of interference and environmental conditions. Whether working in urban environments, near large buildings, or in a challenging landscape, you’re always sure of your location. Innovative technology from Inertial Labs makes this possible by providing navigation in the most adverse conditions. Whether you need to ensure accurate positioning in challenging electromagnetic environments or want to secure your system against jamming and spoofing, our solutions are the ideal choice.
The Inertial Labs INS-D features the top-of-the-line dual antenna Novatel OEM7220 GNSS receiver [23], Figure 16. It contains a real-time spoofing detection unit that employs some of the most effective detection metrics. These metrics include input power analysis by monitoring the gain of the automatic gain control module, structural power content analysis based on the filter outputs, signal quality monitoring to monitor the peak quality affected by multipath signals, and clock monitoring using spoofing signals from a single-antenna source based on the position solution of a moving receiver.
These detection metric outputs are fed to an onboard central spoofing detection unit, which decides whether the unit is under a spoofing attack every two seconds. The spoofing detection unit minimizes false detection likelihood from the presence of jamming and multipath signals while identifying spoofing attacks with a high degree of certainty.
The professional model of INS utilizes an embedded, high-precision, gyro-compensated magnetic compass, which allows the navigation system to measure and output high-precision Heading without GNSS signal even in extreme environmental conditions (temperature, vibration, interference from external magnetic field).
 Figure 16. INS-D.
Figure 16. INS-D.
Inertial Labs developed the Tunnel Guide feature for the GPS-Aided INS, an advanced algorithm that implements continuous dynamic modeling for land vehicle motion [24]. As a result, the INS can mitigate errors and increase the accuracy of its MEMS IMU during prolonged GNSS outages. Now, the position error of a land vehicle remains low even in a GNSS outage area such as a tunnel, a city with signal-blocking buildings, or any location where satellite communication is being blocked, spoofed, or jammed.
The Tunnel Guide feature has proven to be an effective solution for military vehicles such as Infantry Carrier Vehicles (ICV), Mobile Gun Systems (MGS), Anti-Tank Guided Missile Vehicles (ATGM), Anti-Drone Guided Missile Vehicles (ADGMV), NBC Reconnaissance Vehicles (NBCRV), Assault Amphibious Vehicles (AAV), and Light Armored Multipurpose Vehicles (LAMV).
In addition, The M-AJ-QUATRO Anti-Jamming Advanced Antenna System was designed and engineered for Assured Positioning, Navigation, and Timing across diverse and GNSS jammed, spoofed, and denied environments, Figure 17 [25]. This system incorporates Controlled Radiation Pattern Antenna (CRPA) technology alongside state-of-the-art signal processing capabilities, delivering enhanced performance and accuracy for critical applications. The M-AJ-QUATRO Anti-Jam Antenna System is operational in all L1, L2, and L5 GNSS bands.
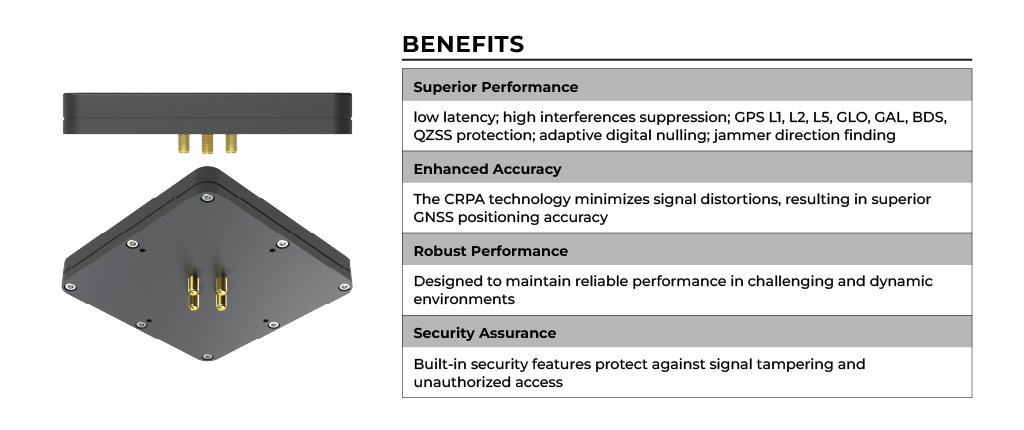 Figure 17. M-AJ-QUATRO.
Figure 17. M-AJ-QUATRO.
Optimized Signal Reception and Transmission Radiation Pattern Control: The CRPA technology ensures that the antenna’s radiation pattern is precisely controlled, optimizing signal reception and transmission. This allows the system to focus on desired signals while minimizing interference from unwanted sources.
M-AJ-QUATRO is a very easy-to-integrate solution compatible with all Inertial Labs products, such as single and dual GNSS antenna-based GPS-aided Inertial Navigation Systems and commercially available GNSS receivers.
This combination of technologies for increased accuracy and anti-jamming/spoofing/multipath ensures efficient and reliable operation in any environment.
Conclusion
Global Navigation Satellite Systems (GNSS) are critical in modern positioning technologies, providing high-accuracy data for various applications. Various existing constellations, such as GPS, GLONASS, Galileo, and BeiDou, and advanced correction techniques, such as DGPS, RTK, and PPP, enable accuracy from meters to centimeters. Despite the influence of factors such as the ionosphere and multipath distortion, advances in technologies such as SBAS, RTK, PPP, and multi-frequency receivers are significantly improving the reliability and accuracy of GNSS. It is essential to realize that GNSS will continue to play a central role in the future, aiding navigation in aviation, unmanned systems, surveying, and other fields that require high-precision positioning.
Inertial Labs’ advanced inertial navigation system technologies and data processing algorithms provide reliable and accurate positioning in jamming and spoofing conditions without a GNSS signal. Practical detection algorithms and minimization of the influence of these effects are implemented in navigation systems. The latest development of noise-resistant antennas will allow users to avoid thinking about the stability of GNSS signals even in the most unfavorable conditions.
References
[1] Wikipedia. “Satellite Navigation.” Wikipedia, 19 Mar. 2020.
[2] “Trilateration.” Wikipedia, 1 Feb. 2023.
[3] “An In-Depth Look at the Principles of GNSS.” Inertial Labs, 23 Aug. 2024.
[4] Global Navigation Satellite System (GNSS). 2006.
[6] “GNSS Applications.” Wikipedia, 10 Jan. 2021.
[7] Jeffrey, Charles, and Roger Munro. In Introduction to GNSS. 28 Mar. 2023.
[8] BOSE, AMITAVA, et al. FUNDAMENTALS of NAVIGATION and INERTIAL SENSORS. PHI Learning Pvt. Ltd., 1 Jan. 2014.
[9] “Atomic Clock.” Wikipedia, 18 Sept. 2020.
[10] Pratap Misra, and Per Enge. Global Positioning System: Signals, Measurements, and Performance. Lincoln, Mass., Ganga-Jamuna Press, 2012.
[11] Jan Van Sickle. GPS for Land Surveyors. Boca Raton, CRC Press, Taylor & Francis Group, 2015.
[12] “Lesson 1: The GPS Signal | GEOG 862: GPS and GNSS for Geospatial Professionals.”.
[13] Grewal, Mohinder S, et al. Global Positioning Systems, Inertial Navigation, and Integration. John Wiley & Sons, 5 Apr. 2004.
[14] Wikipedia Contributors. “Accuracy and Precision.” Wikipedia, Wikimedia Foundation, 25 Mar. 2019.
[15] “Multipath Propagation.” Wikipedia, 29 Dec. 2019.
[16] “Understanding the Difference between Anti-Spoofing and Anti-Jamming.”.
[17] Wikipedia Contributors. “Differential GPS.” Wikipedia, Wikimedia Foundation, 16 Apr. 2019.
[18] “Real-Time Kinematic Positioning.” Wikipedia, 5 June 2022.
[19] Wikipedia Contributors. “Precise Point Positioning.” Wikipedia, Wikimedia Foundation, 1 Apr. 2023.
[20] “GNSS Augmentation.” Wikipedia, 17 July 2022.
[21] “Why Multi-Frequency and Multi-Constellation Matters for GPS/GNSS Receivers?”.
[22] “Anti-Jam Technology: Demystifying the CRPA.” GPS World, 12 Apr. 2017.
[23] “INS – GPS-Aided Inertial Navigation Systems.” Inertial Labs.





