
Abstract
Choosing the right inertial system can significantly impact your project’s success. Our article breaks down the critical distinctions between MEMS-based and FOG-based technologies, helping you make an informed decision. We explore how MEMS (Micro-Electro-Mechanical Systems) offer compact, cost-effective, and energy-efficient solutions ideal for consumer electronics, drones, and automotive applications. In contrast, Fiber Optic Gyroscopes (FOG) provide unparalleled precision and stability, making them essential for aerospace, defense, and high-stakes navigation. Whether you need a lightweight, budget-friendly system or the most accurate and stable technology on the market, understanding these differences will guide your choice. Read on to discover which inertial system best suits your needs and why investing in the right technology is crucial for your application.
The sections will cover Introduction to MEMS and FOG technologies, MEMS and FOG Comparison, and MEMS and FOG-based INS from Inertial Labs. The conclusion will summarize the benefits of using MEMS and FOG-based solutions for navigation.
Section 1. Introduction to MEMS and FOG technologies
Choosing the type of INS (Inertial Navigation System) is an important decision that affects the performance and reliability of your project. From drones and autonomous vehicles to aviation and marine navigation, the right INS can provide smooth and accurate motion tracking even in the most challenging environments. But how do you choose the right technology to meet your accuracy, resilience, and budget requirements fully?
Understanding the differences between INS types and how they perform in real-world scenarios will help you make an informed choice. Whether it’s compact MEMS (Micro-Electro-Mechanical Systems) for mobile solutions or highly accurate FOG (Fiber Optic Gyroscopes) for mission-critical applications, every project has a solution. Let’s break down the key factors that influence the choice of an inertial system and consider which technology is best suited for your application.

Figure 1. Gyroscope technologies comparison.
MEMS
MEMS gyroscopes (and accelerometers) are based on microscopic mechanical structures that detect angular velocity and acceleration changes. MEMS sensors measure vibrations, bends, or deflections of miniaturized masses by converting them into electrical signals [1].
Over the past ten years, the most effective designs for MEMS gyroscopes have proven simple, flat, rigid-proof masses, particularly well-suited for use with standard surface or bulk micromachining technologies. To learn more about the principle of operation and design of MEMS sensors, please see the following link [1]. Below, we will only look at the key points.
To date, MEMS gyroscopes have been developed primarily as vibrating gyroscopes. A simplified model of a vibrating gyroscope is illustrated in Figure 2. The system is a two-dimensional vibrational structure featuring two orthogonal oscillation modes. One of these modes involves the vibration of a proof mass along the x-axis, with an associated oscillation frequency denoted as ![]() :
:

The other mode corresponds to the vibration of the same mass along the y-axis with a frequency ![]() :
:

Typically, these frequencies, ![]() and
and ![]() , are very close to each other.
, are very close to each other.

Figure 2. A simplified model for a MEMS gyroscope.
In operation, the proof mass is driven to oscillate in the x-direction at a frequency ![]() , which is carefully chosen to be near
, which is carefully chosen to be near ![]() . This drive frequency
. This drive frequency ![]() ensures efficient energy transfer and maximizes the amplitude of oscillations. When the system experiences rotation around the z-axis (which is perpendicular to the plane of oscillation) at an angular velocity
ensures efficient energy transfer and maximizes the amplitude of oscillations. When the system experiences rotation around the z-axis (which is perpendicular to the plane of oscillation) at an angular velocity ![]() , a Coriolis force is generated:
, a Coriolis force is generated:

where m is the mass of the proof object, ![]() is the angular velocity, and
is the angular velocity, and ![]() is the velocity of the primary oscillation in the x-direction.
is the velocity of the primary oscillation in the x-direction.
This force acts on the proof mass in the y-direction, inducing vibrations along that axis.
As a result, the mass begins to oscillate in the y-direction at a frequency ![]() , with the amplitude of this induced vibration being directly influenced by the angular velocity
, with the amplitude of this induced vibration being directly influenced by the angular velocity ![]() . The Coriolis force responsible for this effect is given by
. The Coriolis force responsible for this effect is given by ![]() .
.
Specialized sensing and readout circuits are employed to measure the amplitude  of the vibrations in the y-direction. These circuits can detect minute changes in amplitude and convert them into an electrical signal that reflects the angular velocity
of the vibrations in the y-direction. These circuits can detect minute changes in amplitude and convert them into an electrical signal that reflects the angular velocity ![]() . The precision of this measurement is crucial for applications such as navigation, where accurate detection of rotational movement is essential.
. The precision of this measurement is crucial for applications such as navigation, where accurate detection of rotational movement is essential.
FOG
The FOG is based on the Sagnac-Laue effect, which produces a phase difference ![]() proportional to the rotation rate
proportional to the rotation rate ![]() in a ring interferometer [2]. Sagnac’s original setup comprised a collimated source and a beam-splitting plate to separate the input beam into two waves propagating in opposite directions along a closed path defined by mirrors, Figure 3.
in a ring interferometer [2]. Sagnac’s original setup comprised a collimated source and a beam-splitting plate to separate the input beam into two waves propagating in opposite directions along a closed path defined by mirrors, Figure 3.

Figure 3. “Original Sagnac’s setup of a ring interferometer to demonstrate sensitivity to rotation rate. S stands for surface, which means area in French” [2].
A pattern of straight interference fringes was observed when one of the mirrors was slightly misaligned. As the entire system rotated, the fringe pattern shifted laterally. This shift in the fringes corresponds to an additional phase difference ![]() between the two counterpropagating waves, and this shift depends on the enclosed area
between the two counterpropagating waves, and this shift depends on the enclosed area ![]() of the loop and the angular frequency
of the loop and the angular frequency ![]() :
:

The Sagnac effect is the phase shift between two coherent light waves propagating in opposite directions along a closed loop when the loop is rotated. The essence of the effect is that when a closed optical loop is rotated, the time of light traveling in one direction becomes slightly longer than in the other, which leads to a measurable phase shift.
When a light wave is divided into two beams that propagate in opposite directions (along and against the direction of rotation) in a closed loop, their path in a resting system is the same, and the light waves do not experience a phase shift. However, if the loop is rotated, one of the light beams travels faster than M-M’ and the other slower since rotation affects the relative travel time of the light depending on the direction, Figure 4 [3].

Figure 4. The Sagnac effect.
This different path leads to a change in optical length and causes a phase shift ![]() proportional to the loop rotation’s angular velocity.
proportional to the loop rotation’s angular velocity.
Section 2. MEMS and FOG Comparison
The main advantage of MEMS is its meager cost. The use of more affordable materials, advanced manufacturing technologies, compact size, and mass production have reduced the price of these devices. Today, MEMS are widely used in various scenarios, including autonomous vehicles, drones, marine vessels, etc.
MEMS devices are small and lightweight, which allows them to be used effectively in confined spaces such as smartphones and toys. MEMS technology has been found to have applications in a wide range of consumer and industrial applications. In addition, they have low power consumption, which helps to increase the operating time of devices powered by limited energy sources.
Due to their compact size and lightweight nature, MEMS is the preferred solution for unmanned vehicles, where parameters such as size, weight, power, and cost (SWaP-C) are critical.
However, MEMS have their limitations. Due to their technical features and vibrations occurring at high frequencies, MEMS devices are more sensitive to external vibrations, especially at harmonic frequencies. These vibrations can increase the noise in the sensor output, resulting in offsets that require correction using software.
In addition, MEMS gyroscopes are subject to drifts associated with acceleration sensitivity (g-sensitivity). Linear acceleration can cause significant offsets, directly affecting the accuracy of position estimation in INS. Although such accelerations are usually short-term but can have a large magnitude, accumulating errors over time requires accounting and compensation to ensure the necessary accuracy.
*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*-*
Fiber optic gyroscopes (FOG) have become widely used in complex navigation applications due to their low noise level. Compared to MEMS systems, their high accuracy and stability make them the preferred choice in environments where GNSS signals are unavailable or unreliable, such as mining or underwater applications.
FOG can also quickly determine the direction of north (gyrocompassing) [4]. They can record the angular rotation of the Earth even while in motion. With no moving parts, FOG gyrocompasses exhibit exceptional resistance to vibration and shock, surpassing their MEMS counterparts. This property is fundamental in applications such as defense, shipping, and mining operations, where systems are subject to intense vibration.
However, due to the need to use long optical fibers, FOG is significantly larger and heavier than MEMS devices. These fibers increase the system’s overall size and weight and require more power to maintain the light fluxes, reducing the device’s energy efficiency. Despite this, fiber optic gyroscopes remain preferred when high accuracy is critical.
The specific requirements of a given application determine the choice between MEMS and FOG gyroscopes. FOG gyroscopes have excellent bias stability, making them particularly suitable for navigation applications that require accurate inertial measurements over long periods. However, their significant size, weight, power consumption, and cost (CSWaP) limit their use in applications where these parameters are critical, such as autonomous unmanned vessels, industrial machinery, and spacecraft. In contrast, MEMS gyroscopes provide accurate data at a significantly lower cost and in a more compact and lightweight form. This makes them preferable for some industrial and tactical applications where compactness and low cost are essential. MEMS technology also opens opportunities for innovation, including integrating different types of sensors, improved error correction methods, and using advanced data fusion algorithms. These improvements enable higher system performance while maintaining low CSWaP, making MEMS gyroscopes a competitive solution for applications that balance precision and resource constraints.
In addition, MEMS systems offer greater design flexibility, allowing them to be tailored for specific applications such as wearables, stabilization systems, and autonomous vehicles, ensuring high reliability while maintaining affordability.
The key differences between the technologies are shown in Table 1.
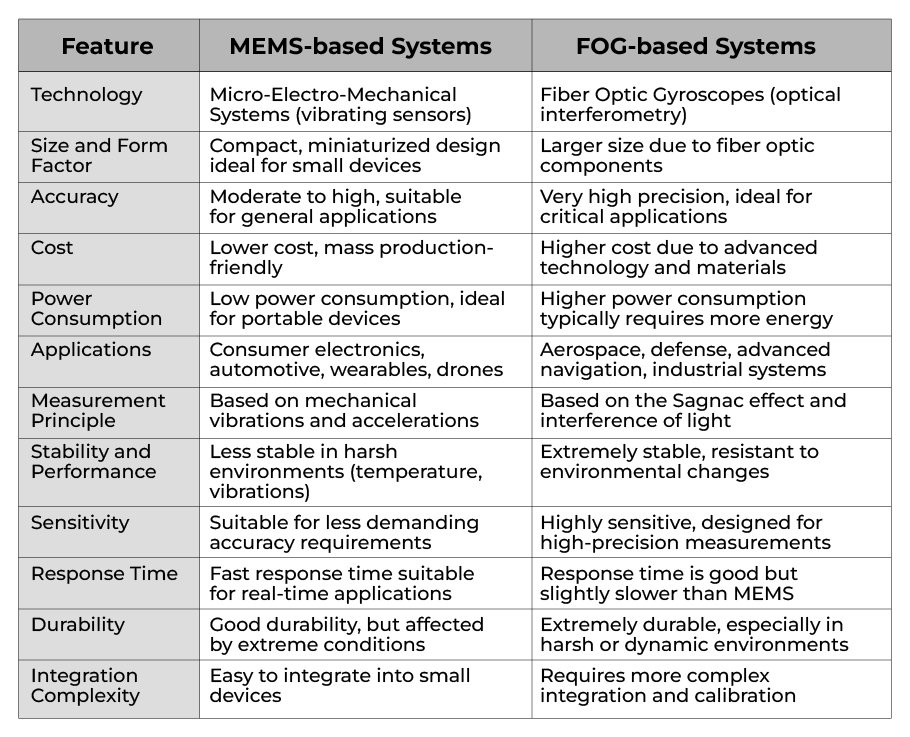
Table 1. Key differences between MEMS and FOG technologies.
Thus, both technologies have pros and cons, so the choice of a specific solution depends on the needs and tasks of the user.
Section 3. MEMS and FOG-based INS from Inertial Labs
The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System – INS is a new generation of fully integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU, and L-Band navigation and high-performance strapdown system that determines position, velocity and absolute orientation (Heading, Pitch, and Roll) for any device on which it is mounted. Horizontal and Vertical Position, Velocity, and Orientation are accurately determined for both motionless and dynamic applications [5].
The Inertial Labs INS utilizes advanced single and dual antenna GNSS receiver, barometer, and 3-axes, each calibrated in full operational temperature range precision Fluxgate magnetometers, Accelerometers, and Gyroscopes to provide accurate Position, Velocity, Heading, Pitch, and Roll of the device under measure. INS contains Inertial Labs’ new onboard sensors fusion filter, state-of-the-art navigation and guidance algorithms, and calibration software.
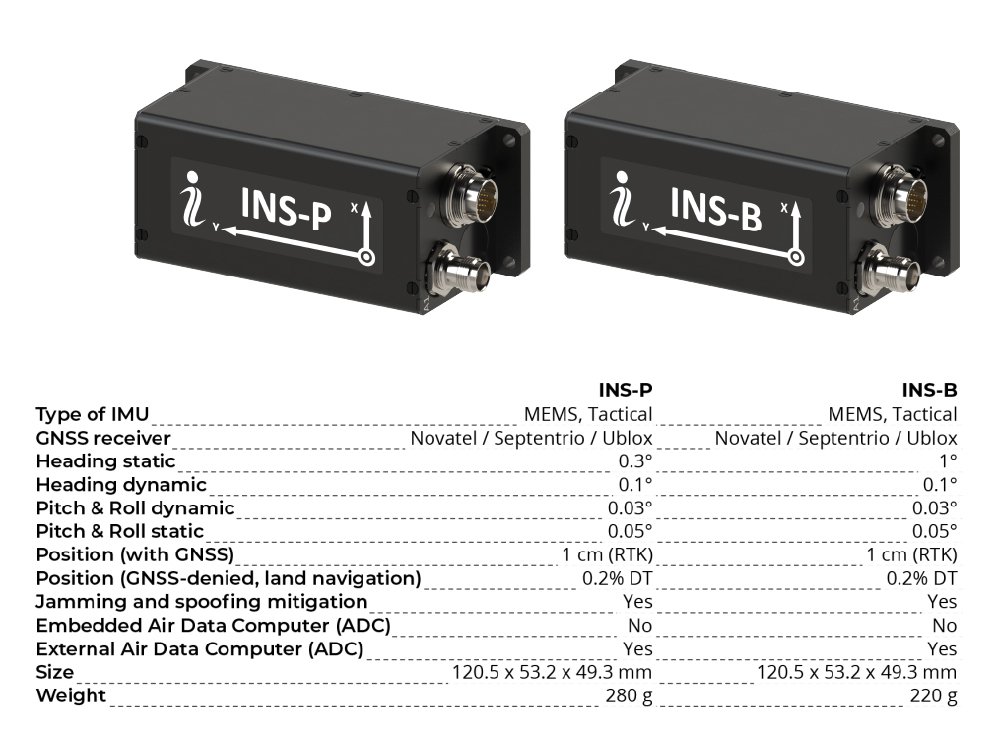
Figure 5. MEMS-based INS-P and INS-B.
The Inertial Labs GPS-Aided Inertial Navigation System INS-DM-FI is the newest Inertial Navigation System (INS) developed by Inertial Labs using Tactical-grade Fiber Optic Gyroscopes technology. The INS-DM-FI results from over 20 years of experience designing and supplying INS solutions to land, marine, and aerial platforms worldwide. This system, the INS-DM-FI, is an IP-68 rated version of an all-new generation of super ruggedized, shielded from the EMC/EMI, fully integrated, combined INS + AHRS + MRU + FOG IMU-based Attitude & Heading Reference System (AHRS) + optional embedded Air Data Computer (ADC) high-performance strapdown system. It determines position, velocity, vertical and horizontal displacements, and absolute orientation (Heading, Pitch, and Roll) for any device on which it is mounted. Horizontal and Vertical Position, Velocity, and Orientation are accurately determined for both motionless and dynamic applications.
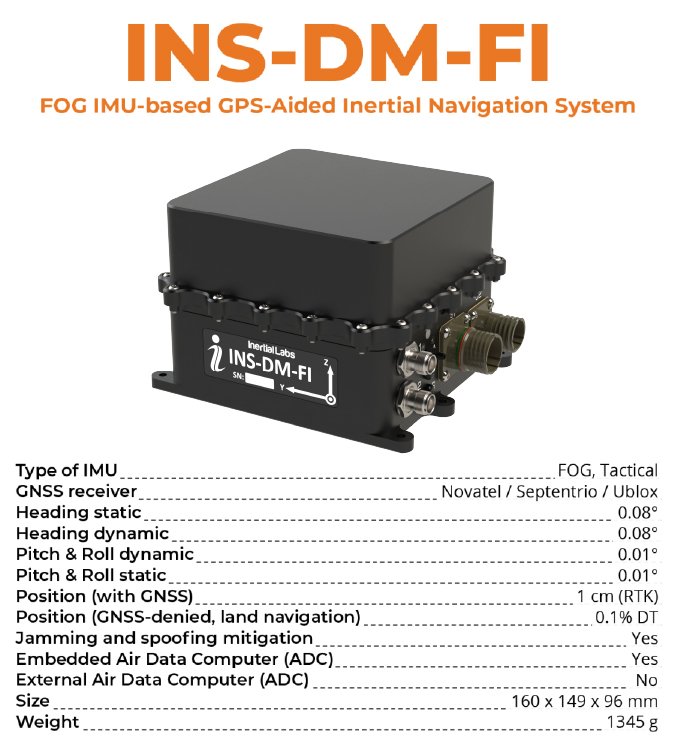
Figure 6. FOG IMU-based AHRS and inertial navigation system INS-DM-FI.
The Inertial Labs INS-DM-FI contains Inertial Measurement Units (IMU) utilizing Tactical-grade Fiber Optic Gyroscopes and MEMS accelerometers. The INS-DM-FI also utilizes embedded multi-constellation (GPS, GLONASS, GALILEO, QZSS, and BEIDOU) GNSS receivers like NovAtel OEM7 series, u-blox F9 or Septentrio mosaic-H series [6].
The design of the INS-DM-FI also includes an optional embedded Air Data Computer (ADC), supported by two barometers and the ability to support an external Stand-Alone Magnetic Compass (SAMC). The INS-DM-FI contains Inertial Labs’ latest onboard sensor fusion filter version, state-of-the-art navigation and guidance algorithms, and calibration software.
Conclusion
In conclusion, choosing MEMS-based and FOG-based inertial systems depends on your specific precision, budget, size, and environmental stability requirements. MEMS-based systems are ideal for applications that prioritize compactness, low cost, and energy efficiency, making them suitable for consumer devices and general-purpose navigation. On the other hand, FOG-based systems excel in scenarios demanding ultra-high precision, long-term stability, and robustness, especially in critical fields like aerospace and defense.
Ultimately, selecting the right inertial technology is about balancing performance with practicality. By understanding the strengths and limitations of each system, you can make a well-informed decision that ensures optimal performance and reliability for your application.
Among the many developers, Inertial Labs™ stands out for offering customizable solutions that meet the unique needs of different applications. Their systems are designed to be easily integrated with a wide range of external sensors, allowing for flexibility that improves system performance and simplifies user integration. This approach not only simplifies development but also significantly reduces the associated costs.
References
[1] Bao, Minhang. Analysis and Design Principles of MEMS Devices. Elsevier, 12 Apr. 2005.
[2] Lefevre, Herve C. The Fiber-Optic Gyroscope, Third Edition. Artech House, 31 Jan. 2022.
[3] Auguste Renoir. 2 2 SAGNAC EFFECT GENERAL PRINCIPLE. 2014, www.semanticscholar.org/paper/2-2-SAGNAC-EFFECT-GENERAL-PRINCIPLE-Renoir/5b7f041df00afe465d837a913f07e720b0547293/figure/1. Accessed 19 Nov. 2024.
[4] Prikhodko, Igor P., et al. “What Is MEMS Gyrocompassing? Comparative Analysis of Maytagging and Carouseling.” Journal of Microelectromechanical Systems, vol. 22, no. 6, Dec. 2013, pp. 1257–1266, https://doi.org/10.1109/jmems.2013.2282936.
[5] “INS – GPS-Aided Inertial Navigation Systems.” Inertial Labs, 13 Aug. 2024, inertiallabs.com/products/ins-inertial-navigation-systems/.
[6] “FOG IMU-BASED AHRS and INERTIAL NAVIGATION SYSTEM INS-DM-FI” https://inertiallabs.com/wp-content/uploads/2024/10/INS-DM-FI_Datasheet_rev1.6_Sept30_2024.pdf





