
Abstract
Modern GPS technologies open new horizons for precise positioning, but their full potential is only realized when powerful hardware and advanced software are combined. In a world where data accuracy is critical, post-processing of GPS information is becoming a key tool for professionals in various industries. In this article, we reveal how post-processed kinematic (PPK) allows you to minimize errors, provide high coordinate accuracy, and increase the reliability of geospatial data. Readers will learn about the benefits of post-processing, and we also showed the real difference between Standalone GPS and PPK. Find out why post-processing is an investment in the quality of your data.
Here are the sections that will be covered: “The Importance of GPS in the Modern World,” “Why Post-processing is Needed?”, “Example of Real Data,” and “LiDAR Payload and Post-processing LiDAR Data Solution from Inertial Labs.” The conclusion will summarize the benefits of PPK and how the Inertial Labs™ approach reduces the time spent on fieldwork, minimizes the risk of errors, and significantly reduces the need for manual data processing.
Section 1. The Importance of GPS in the Modern World
The Global Positioning System (GPS) has become an integral part of modern life, covering many areas from everyday use to high-tech applications [1]. Its importance can be viewed from several key perspectives:
- GPS makes getting around easier by allowing people to find optimal routes, avoid traffic jams, and plan travel.
- Mobile Apps. Most transportation, delivery, social media, and fitness apps use GPS to provide personalized services.
- Lost and found. GPS-connected trackers help find lost items, pets, or vehicles.
- Creating highly accurate maps. GPS helps collect spatial data with minimal errors.
- Updating geographic data. Regular use of GPS allows you to update maps for cities, roads, and natural objects.
- Cargo Monitoring. Companies use GPS to track cargo movement, ensure safety, and reduce delivery time.
- Autonomous vehicles. Self-driving cars and drones rely on GPS for precise orientation.
- Air and sea transport. Pilots and captains use GPS for navigation, route planning, and collision avoidance.
- Precision farming. GPS helps optimize crop areas, manage irrigation, and minimize fertilizer use.
- Machinery monitoring. The system allows you to track agricultural machinery and improve its efficiency.
- Earth Science. Surveyors use GPS to analyze tectonic movements and monitor deformations of the Earth’s surface.
- Scientists use GPS to monitor weather conditions, glaciers, and sea levels.
- Accurate GPS data is used to synchronize telescopes and radio observations.
- Emergency services. GPS helps emergency services find lost people, navigate difficult conditions, and reduce response times.
- Military Applications. Initially developed for military purposes, GPS is used for navigation, mission planning, and drone control.
- AR and VR applications. Games and augmented reality technologies use GPS to interact with the world around you.
- GPS helps tourists navigate unfamiliar places, find attractions, and plan routes.
- Economic effect. GPS technologies speed up processes and reduce business costs, increasing productivity.
GPS is a technology and the basis of many modern processes, from personal to global. Every year, GPS is increasingly integrated with artificial intelligence, the Internet of Things (IoT), and big data, making it a key part of the digital age.
Now, let’s move on to post-processing and its use.
Post-processing, known as post-processed kinematic, abbreviated PPK, is an approach in which raw GPS data measurements recorded by a GPS receiver are processed after data collection [2]. The data is exported to software, which undergoes a unique processing procedure. This process includes mechanisms for averaging the received data, cutting off false values, and reducing errors. A good example of such software is PCMasterPro from Inertial Labs [3].
In addition to PPK, there is another approach called RTK (Real-Time Kinematic) – a positioning method where GPS corrections are transmitted in near real-time, usually via an RTCM stream [4]. However, this method can face problems related to the transmitted corrections” availability, completeness, coverage, and compatibility. However, PPK has a key advantage over RTK. This advantage is that the data can be optimized in post-processing, including forward and backward processing. In RTK, any interruption or incompatibility of corrections immediately reduces the accuracy of the positioning.
The main advantage of PPK is that there is no need for data transmission or radio communication to receive RTCM corrections, which simplifies operation in the field.
The main limitation of post-processing is the need for additional time to process the data, which can be critical for applications with strict time requirements. However, if the time lag is acceptable, PPK can significantly improve the quality of the data and the results.
In the next section, we will take a closer look at how post-processing works.
Section 2. Why Post-processing is Needed?
PPK processing of GPS data is used to improve the accuracy and reliability of location information, which is not achievable with Standalone GPS alone:
- GPS data often suffers from errors caused by atmospheric conditions, satellite geometry, and multipath effects. Standard GPS (single frequency) typically provides an accuracy range of 5–10 meters. The influence of factors on positioning accuracy is given in Table 1.
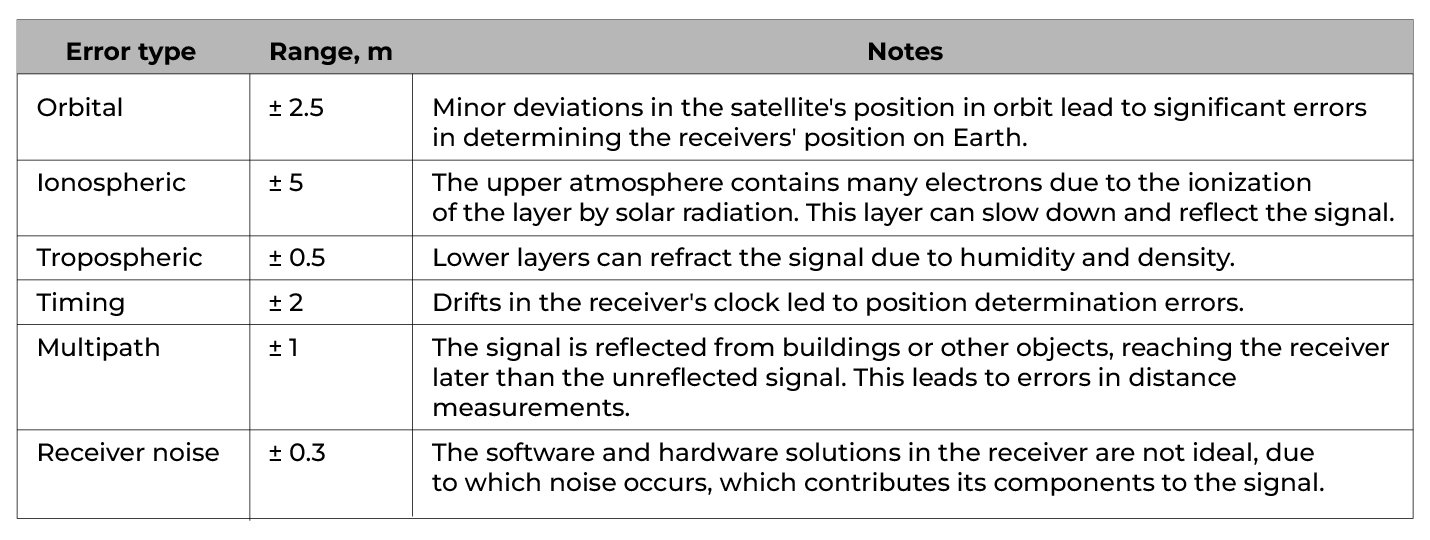 Table 1. The influence of factors on the accuracy of positioning.
Table 1. The influence of factors on the accuracy of positioning.
- By applying corrections after data collection, much higher accuracy can be achieved, often down to the centimeter level. This is especially useful in surveying, mapping, and engineering applications.
- Post-processing allows users to collect data in areas with poor connectivity or without access to real-time correction services.
- Post-processing provides rigorous quality checks such as signal quality checks, ambiguity resolution, and redundancy assurance. This is critical in professional fields such as surveying, construction, and scientific research.
- Post-processed GPS data can be synchronized with data from other sensors such as IMU, LiDAR systems, or photogrammetry [5, 6]. This ensures consistency and accuracy across geo-referenced datasets.
The principle of data processing during post-processing is straightforward. Look at Figure 1 shows the positioning accuracy depending on time. Let’s assume that half of the way, the car was driving in open terrain, and there was good visibility of satellites. Accordingly, the positioning error is minimal. Then, halfway through, the car went into a tunnel without a satellite signal. The positioning error began to increase, and after leaving the tunnel, it again became close to zero.
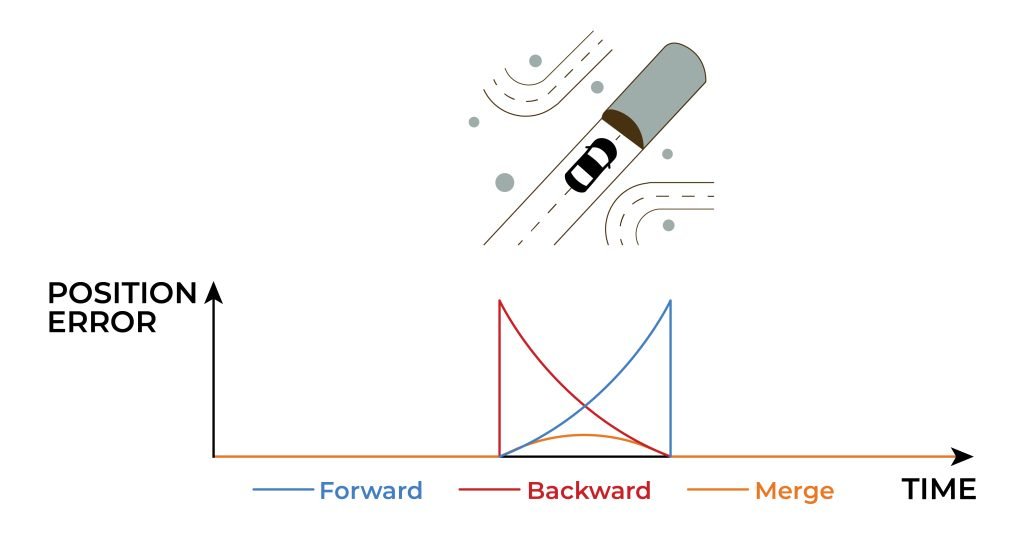
Figure 1. Principle of GPS data post-processing.
In post-processing, we “rewind time” and process the data in reverse chronological order since the physical equations still apply. With this reverse processing, the error peaks at the actual onset of the GPS failure, showing symmetry concerning conventional forward processing (orange line).
Combining the two solutions, forward (blue line) and Backward (purple line), results in the maximum error occurring approximately in the middle of the failure. However, its value is significantly smaller than processing data only in the forward or backward direction.
But, as stated earlier, this approach is only available after collecting data.
Section 3. Example of Real Data
Consider the accuracy of Standalone GPS and PPK data as a real example. We will show the difference using point clouds. The first point cloud was obtained after the post-processing of raw data, and as you can see in Figure 2, it looks perfect visually. We also conducted an analysis using checkpoints, Figure 3.

Figure 2. Postprocessed Aerial Point Cloud.

Figure 3. Ground control points report (PPK).
Please note that the result is excellent. The average accuracy value for the height Dz is less than 2 cm. Let’s look at the cloud point obtained using Standalone GPS, as shown in Figure 4. Upon visual inspection, you can see that the tree crowns are no longer as clearly defined, and the contours of buildings and other objects are uneven and noisy.

Figure 4. Standalone GPS Point Cloud.
The accuracy analysis by checkpoints is shown in Figure 5. In this case, the result was so bad that this data is unsuitable for actual use.

Figure 5. Ground control points report (Standalone GPS).
The average value of the accuracy of Dz in height is about 1 m. Let us also compare both clouds in section, as shown in Figure 6.

Figure 6. Comparison of two point clouds cross-sectionally.
In an unprocessed cloud, the absolute and relative errors are an order of magnitude greater than in a processed cloud.
So, we can summarize and highlight the main benefits of investing in post-processing:
- Post-processing eliminates systematic and random errors that occur during data collection. This reduces the probability of design errors that may result in delays and increases correction costs.
- Post-processing allows for promptly correcting data in the office, reducing the time required to collect information in complex conditions (for example, with a weak GPS signal).
- Workers can move on to the next project faster instead of spending time fixing field inaccuracies. Reduced time spent in the field conditions reduces wear equipment and the likelihood of failure, saving funds for repairs and maintenance.
- Instead of using expensive RTK systems in real-time, it is possible to apply more available devices, providing the same high accuracy.
Thus, post-processing makes it possible to use various GPS technologies” advantages for navigation, including LiDAR—payload, for example, RESEPI from Inertial Labs.
Section 4. LiDAR Payload and Post-processing LiDAR data Solution from Inertial Labs
RESEPI GEN-II
If you are looking for a cheap, reliable, and versatile solution that mounts on drone vehicles and allows for manual scanning, then the RESEPI (Remote Sensing Payload Instrument) GEN – II with RTK and PPK support is your key to precise positioning and unrivaled data quality! The equipment has advanced NovAtel OEM7720 GPS receivers, working with GPS, GLONASS, Galileo, and BeiDou systems, which provide stable signal reception regardless of conditions [7].
The RESEPI GEN-II payload is an advanced, next-generation, sensor-fusion platform designed for accuracy-focused real-time and post-processed aerial, mobile, and pedestrian-based remote sensing applications, Figure 7.
RESEPI GEN-II utilizes InertiaLabs’ Dual Antenna Inertial Navigation System (INS-D), a high-performance and expandable navigation system powered by InertiaLabs’ Extended Kalman Filter (EKF). Within this system lies a Tactical Grade Inertial Measurement Unit (IMU), the Kernel-210, also by Inertial Labs. It provides more expandability over its predecessor by offering end-users and integrators the ability to integrate their platforms by taking advantage of built-in software integrations made by MAVLink and DJI’s Payload SDK (PSDK). Benefit from two new camera options with a broader field of view, faster shutter speeds, and higher resolution images. Field-swappable mounts and accessories easily integrate with platforms like the WISPR Ranger Pro 1100, Freefly Astro, Sony Airpeak S1, and DJI M350.

Figure 7. RESEPI GEN-II.
The RESEPI GEN-II platform features a more powerful on-board computing module for real-time point cloud visualization and further integrations with external/additional sensing modules, giving users the ability to integrate and synchronize their additional cameras and LiDAR or input-aiding data to the navigation filter from wheel speed sensors, encoders, externaIMU’s’s or Air Data Computers (ADC). This payload is ideally suited for plug-and-play with end-users and engineering firms looking to adopt a hardware package that offers customization and expandability with a versatile remote sensing solution.
Your projects deserve the best, and RESEPI GEN – II will take your business to the next level!
How does PCMasterPro enhance the ease of use of RESEPI?
But the device is only half the success. User-friendly software for data processing is essential. The LiDAR payload consists of a LiDAR and an INS (optionally, an RGB camera can also be included). The data gathered from both devices must be fused to get LiDAR points geo-referenced and transformed from the LiDAR reference frame to geographic coordinates. PCMasterPro software is designed just for that, Figure 8.
Additionally, it observes and corrects for misalignments between the INS and the lasers of the LiDAR. PCMasterPro software takes INS trajectory generated by Post-Processed Kinematics software, LiDAR scan files, and camera images generated by the LiDAR payload system. It converts them to LAS/LAZ format point clouds for further processing.

Figure 8. PCMasterPro.
The key features of PCMasterPro are:
- Post-Processing of Inertial Data
- Fast data processing
- Effectively processing multiple datasets at once
- Point cloud visualization and colorization
- Visualization of misalignment correction
- Point coloring by selected path number, laser number, or intensity
- 3D distance measurement tool
- XML project format for ease of automation
All processes are automated and carried out semi-automatically for the user’s convenience. As a result, the workflow is simplified to” “Data collection → Automatic post-processing in PCMasterPro → Accurate point cloud (including colored) in LAS/LAZ format.”
Conclusion
Modern GPS technologies provide powerful tools for precise positioning. Still, their actual value is only realized when using an integrated approach that combines advanced equipment and data post-processing kinematic (PPK), minimizes errors, increases coordinate accuracy, and provides the reliability needed to perform complex tasks. Comparison of Standalone GPS and PPK on accurate data demonstrates the benefits of post-processing, making it an indispensable element for professionals seeking to optimize workflows and improve the quality of results. Investing in post-processing is a step towards a confident future and new standards.
A comprehensive automated solution consisting of LiDAR Payload and specialized PCMasterPro data processing software from Inertial Labs™ offers significant benefits to users of geospatial technologies. This solution combines accuracy and efficiency, allowing automatic data collection with minimal errors and fast processing. The device collects data in real-time, and the software performs post-processing, eliminating errors and optimizing the results. This approach reduces the time spent on fieldwork, minimizes the risk of errors, and significantly reduces the need for manual data processing. As a result, users receive high-quality and accurate point clouds with minimal investment of resources and time, making such solutions especially attractive to surveying, construction, and cartography professionals.
References
[1] “Wikipedia Contributors “Global Positioning System”. Wikipedia, Wikimedia Foundation, 14 Feb. 2019, en.wikipedia.org/wiki/Global_Positioning_System.
[2] “Wikipedia Contributors” “Differential GP”. Wikipedia, Wikimedia Foundation, 7 Sept. 2024.
[3 “Introduction to PCMasterPro – RESEP.” RESEPI, 25 July 2024, lidarpayload.com/docs/introduction-to-pcmasterpro/introduction-to-pcmasterpro/. Accessed 17 Dec. 2024.
[4 “Real-Time Kinematic Positionin”. Wikipedia, 5 June 2022, en.wikipedia.org/wiki/Real-time_kinematic_positioning.
[5] “Integrating Inertial Navigation Systems: What to Kno”? Inertial Labs, 14 Nov. 2024, inertiallabs.com/integrating-inertial-navigation-systems-what-to-know. Accessed 17 Dec. 2024.
[6] “How Does an INS Wor”? Inertial Labs, 10 Oct. 2024, inertiallabs.com/how-does-an-ins-works/.
[7 “RESEPI – LiDAR Payload & SLAM Solution.” RESEPI, 12 July 2024, lidarpayload.com/.





