
Abstract
When precision matters, a survey-grade Inertial Navigation System (INS) can make all the difference in UAV operations. This article explores the key benefits of integrating survey-grade INS into drones for high-accuracy applications such as mapping, infrastructure inspection, and topographic surveying. Learn how these advanced systems deliver centimeter-level positioning and unparalleled orientation stability, even in challenging environments. We also discuss how the combination of survey-grade INS and GNSS ensures reliable data quality, minimizes errors, and enhances the efficiency of workflows in industries where accuracy is paramount. Discover why investing in a survey-grade INS can elevate your UAV missions to a new level of precision and reliability.
The sections will cover the role and importance of INS on UAVs, the benefits of using survey-grade INS on UAVs, and Pixhawk integration with Inertial Labs’ INS-P. The conclusion will summarize the benefits of using survey-grade INS on a UAV.
Section 1. The role and importance of INS on UAVs
The Inertial Navigation System (INS) plays an essential role in UAVs (Unmanned Aerial Vehicles), providing navigation and positioning without dependence on external data sources such as GNSS. The INS includes a set of sensors, such as gyroscopes and accelerometers, that measure angular velocities and accelerations to determine the position and orientation of the vehicle in space, Figure 1—more details on how the INS works can be found at [1].

Figure 1. INS Structure Diagram.
In tunnels, forests, high altitudes, or military operations, the GNSS signal may be lost or affected by jamming or spoofing, Figure 2 [2]. During flight, if the GNSS signal becomes unstable or temporarily disappears, the INS continues to track the UAV’s movements. When the GNSS signal recovers, the INS can correct errors and synchronize data, ensuring smooth navigation.

Figure 2. Jamming and Spoofing.
For mapping and other geospatial applications, INS+GNSS helps to accurately determine the location and orientation of sensors (e.g., LiDAR or camera) during data collection, enabling accurate georeferenced point clouds [3].
Thus, INS on UAVs significantly improves their autonomy, accuracy, and ability to operate in environments where other navigation systems may fail or not be available. This makes INS indispensable for various applications, including topographic surveys, military operations, environmental monitoring, and commercial and scientific missions.
INS classification by accuracy
Conditionally, six main classes of INS accuracy can be distinguished, namely:
- Consumer grade. The most affordable and widely used INS is applied in consumer devices such as smartphones, toy drones, and gadgets. These systems provide essential accuracy sufficient for simple applications. They are used for general-purpose drone navigation, fitness devices, smartphones, and basic AR/VR applications.
- Industrial grade. Mid-level INS that offer higher accuracy and stability compared to consumer-grade systems. Often used in industrial automation, robotics, and commercial UAVs, it is applied in commercial drones, autonomous vehicles, and industrial robots.
- Tactical grade. INS provides the accuracy required for military and some industrial tasks. These systems resist external interference and can operate under harsh vibration or dynamic conditions. They are used in military drones, defense systems, weapon stabilization systems, and autonomous vehicles.
- Survey grade. High-level INS designed for tasks requiring centimeter-level positioning accuracy and very high orientation stability. These systems are often integrated with high-precision GNSS applied in surveying, mapping, high-precision UAV surveying, infrastructure inspection, topographic work, and autonomous construction applications.
- Navigation grade. Highly accurate INS is used in systems for long-term navigation, such as maritime vessels, aircraft, and submarines. These systems provide high stability and minimal accumulation of errors over long periods.
- Strategic grade. The highest-level INS is used in strategic applications, such as intercontinental ballistic missiles (ICBMs) and spacecraft. These systems offer exceptional accuracy and stability over extended periods.
Consider the accuracy, cost, and application area balance when choosing an INS. Survey-grade and navigation-grade systems are often used in applications where high accuracy is critical. In contrast, tactical-grade systems are employed in tasks with higher reliability requirements but slightly lower accuracy. The sensors’ quality determines the classification of INS, the level of accumulated errors, stability under various conditions, the complexity of data processing algorithms, and the precision and reliability requirements for specific applications. High-end systems, such as survey-grade and navigation-grade, provide maximum accuracy but are significantly more expensive and complex to integrate than consumer or industrial systems.
Section 2. Benefits of using survey-grade INS on UAVs
Survey-grade INS on UAVs has several significant advantages, especially for applications requiring high accuracy and reliability. These systems provide centimeter-level accuracy and can be used with other high-tech sensors such as GNSS, LiDAR, and photogrammetric cameras.
Survey-grade INS provides the accuracy required for precise surveying and mapping tasks. This is especially important for land surveying, topographic mapping, construction, and infrastructure monitoring applications. These systems provide high accuracy in determining the angles of tilt, rotation, and orientation of the UAV, which is critical for the accurate positioning of sensors (e.g., LiDAR or camera) on board the vehicle. This allows georeferenced data to be acquired with high accuracy.
In conditions of a poor or absent GPS signal (e.g., in canyons, forests, or when flying indoors), the georeferenced INS continues to provide accurate navigation for longer than a lower-class INS. This ensures that the UAV can continue to perform its mission even when the GPS signal becomes unreliable or unavailable.
Suppose the survey-grade INS works with a high-precision GNSS (such as RTK or PPP). In that case, it can significantly improve data accuracy (down to the centimeter level) and minimize positioning errors. Survey-grade INS for your UAV is an excellent compromise between price and quality. The INS from Inertial Labs is one such solution.
Section 3. Pixhawk integration with Inertial Labs’ INS-P
The professional model of INS, the INS-P, Figure 3, utilizes an embedded, high-precision, gyro-compensated magnetic compass, which allows the navigation system to measure and output high-precision Heading without GNSS signal even in extreme environmental conditions (temperature, vibration, interference from external magnetic field) [4].
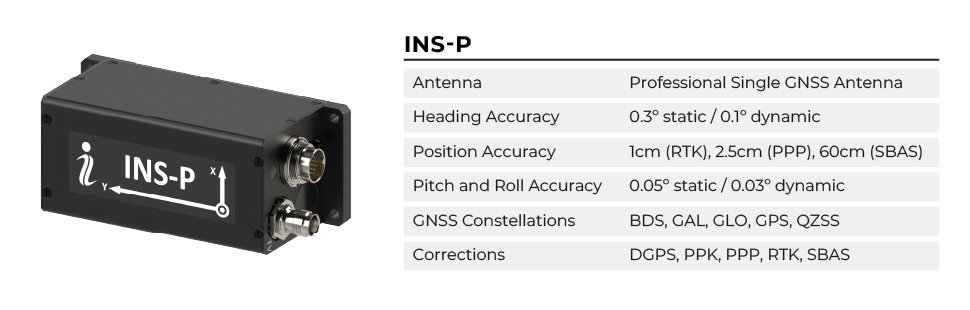
Figure 3. Professional model of INS
The Inertial Labs INS utilizes advanced single and dual antenna GNSS receiver, barometer, and 3-axes, each calibrated in full operational temperature range precision Fluxgate magnetometers, Accelerometers, and Gyroscopes to provide accurate Position, Velocity, Heading, Pitch, and Roll of the device under measure. INS contains Inertial Labs’ new onboard sensors fusion filter, state-of-the-art navigation and guidance algorithms, and calibration software. Key Features and Functionality are shown in Figure 4.

Figure 4. INS-P Key Features and Functionality.
Most current low-cost solutions often use consumer device class IMUs such as MPU6000/MPU9250/ICM-20689, where gyro drift reaches +- 5-20 °/sec [5-7].
As we know, gyroscopes measure angular velocity, which needs to be integrated to obtain orientation angles [1]. Any error in the gyroscope measurements (drift) will accumulate during integration, leading to significant orientation deviations over time. Even minimal drift can become substantial over time. A Kalman filter can mitigate these effects but not eliminate error accumulation, especially for long-term measurements. Therefore, the more accurate the IMU (slight drift), the less error will accumulate when flying without GNSS signals.
A professional solution such as INS-P from Inertial Labs is necessary for applications requiring high accuracy and reliability, even in the most challenging conditions. Our integration with ArduPilot with the Pixhawk flight controller is proof of this [8].
Many current drone flight controllers need to be more accurate for tasks that require higher accuracy and reliability, such as photogrammetry or LiDAR scanning. Our Pixhawk Autopilot integration with the INS-P allows end users to increase system and navigational performance by using existing aiding data sources that may include airspeed sensors, attitude data (heading, pitch, or roll), wind speed sensors, doppler velocity logs, and external altitude information. This integration is just another one of the many ways Inertial Labs continues to improve and enhance the autonomous community.
The INS-P is connected to the Pixhawk Autopilot using the standard RS-232 serial interface. The resulting integration fuses IMU and GNSS data from the INS-P and uses it in the ArduPilot Kalman Filter on the Pixhawk. This data from the Inertial Labs INS-P includes necessary navigation data such as position, velocity, and a time stamp. In turn, this data fuses with Pixhawk Autopilot sensor data, which includes:
- Optional Static and Dynamic Pressure sensors for calculating Airspeed.
- Magnetometer for Aiding in Course Correction.
- Triple Redundant IMU with multiple gyroscopes, barometers, and accelerometers.
- Optional additional GNSS receivers for dual antenna heading calculation.
- Optional camera inputs for detection, recognition, and tracking.

Figure 5. INS-P with Pixhawk integration.
During an hour-long GNSS outage, horizontal position drift for the Pixhawk Autopilot integration tops out at an estimated nine nautical miles (NM).
Although there are other alternatives, including a standard ring laser gyro-based navigation system with similar results, the Pixhawk Autopilot integration solution comes in at one-third of the cost, offering a far better price-performance ratio with the enhanced benefit of customization [9].
Conclusion
When precision matters, a survey-grade Inertial Navigation System (INS) can make all the difference in UAV operations. This article explores the key benefits of integrating survey-grade INS into drones for high-accuracy applications such as mapping, infrastructure inspection, and topographic surveying. Learn how these advanced systems deliver centimeter-level positioning and unparalleled orientation stability, even in challenging environments. We also discuss how the combination of survey-grade INS and GNSS ensures reliable data quality, minimizes errors, and enhances the efficiency of workflows in industries where accuracy is paramount. Discover why investing in a survey-grade INS can elevate your UAV missions to a new level of precision and reliability.
In summary, using a survey-grade INS on a UAV is essential for applications that demand exceptional accuracy and reliability. The advanced capabilities of these systems ensure precise positioning and orientation, making them indispensable for professional mapping, surveying, and infrastructure assessment tasks. While investment in survey-grade technology may be significant, reduced error margins, higher data quality, and streamlined workflows make it valuable for achieving the best results in high-stakes projects. For professionals committed to precision, a survey-grade INS is a critical tool that transforms the potential of UAV operations.
One such instrument is the INS-P from Inertial Labs. The system provides centimeter accuracy when using GNSS. In its absence, as shown by our integration of the system with Pixhawk Autopilot, Pixhawk Autopilot, the error was at most 9 NM in one hour of flight time.
References
[1] Mendez, Maria. “How Does an INS Work?” Inertial Labs, 10 Oct. 2024, inertiallabs.com/how-does-an-ins-works/.
[2] Mendez, Maria. “What Are the Limitations of GNSS?” Inertial Labs, 2 Oct. 2024, inertiallabs.com/what-are-the-limitations-of-gnss/.
[3] Mendez, Maria. “GNSS and INS Tight-Coupling – Why Does It Matter?” Inertial Labs, 15 Oct. 2024, inertiallabs.com/gnss-and-ins-tight-coupling-why-does-it-matter/.
[4] “INS – GPS-Aided Inertial Navigation Systems.” Inertial Labs, 13 Aug. 2024, inertiallabs.com/products/ins-inertial-navigation-systems/.
[5] alldatasheet.com. “MPU-6000 Datasheet(PDF).” Alldatasheet.com, 2021, www.alldatasheet.com/datasheet-pdf/pdf/517743/ETC1/MPU-6000.html. Accessed 19 Nov. 2024.
[6] alldatasheet.com. “MPU-9250 Datasheet(PDF).” Alldatasheet.com, 2024, www.alldatasheet.com/datasheet-pdf/pdf/1132035/TDK/MPU-9250.html. Accessed 19 Nov. 2024.
[7] alldatasheet.com. “ICM-20689 Datasheet(PDF).” Alldatasheet.com, 2021, www.alldatasheet.com/datasheet-pdf/pdf/1137954/TDK/ICM-20689.html. Accessed 19 Nov. 2024.
[8] Rudenko, Roman. “Pixhawk Integration Custom Solutions an Open Source Flight Controller.” Inertial Labs, 26 Aug. 2021, inertiallabs.com/custom-solutions-from-pixhawk-integration-an-open-source-flight-controller-2/.
[9] GPS-Aided INS-DM-FI Datasheet Revision 1.6 FOG IMU-BASED AHRS and INERTIAL NAVIGATION SYSTEM INS-DM-FI.





